Operation of spinal sensorimotor circuits controlling phase durations during tied-belt and split-belt locomotion after a lateral thoracic hemisection
- Department of Neurobiology and Anatomy, College of Medicine, Drexel University, United States
- Department of Pharmacology-Physiology, Faculty of Medicine and Health Sciences, Centre de Recherche du CHUS, Université de Sherbrooke, Canada
- School of Biological Sciences, Georgia Institute of Technology, United States
Figures
Figure 1
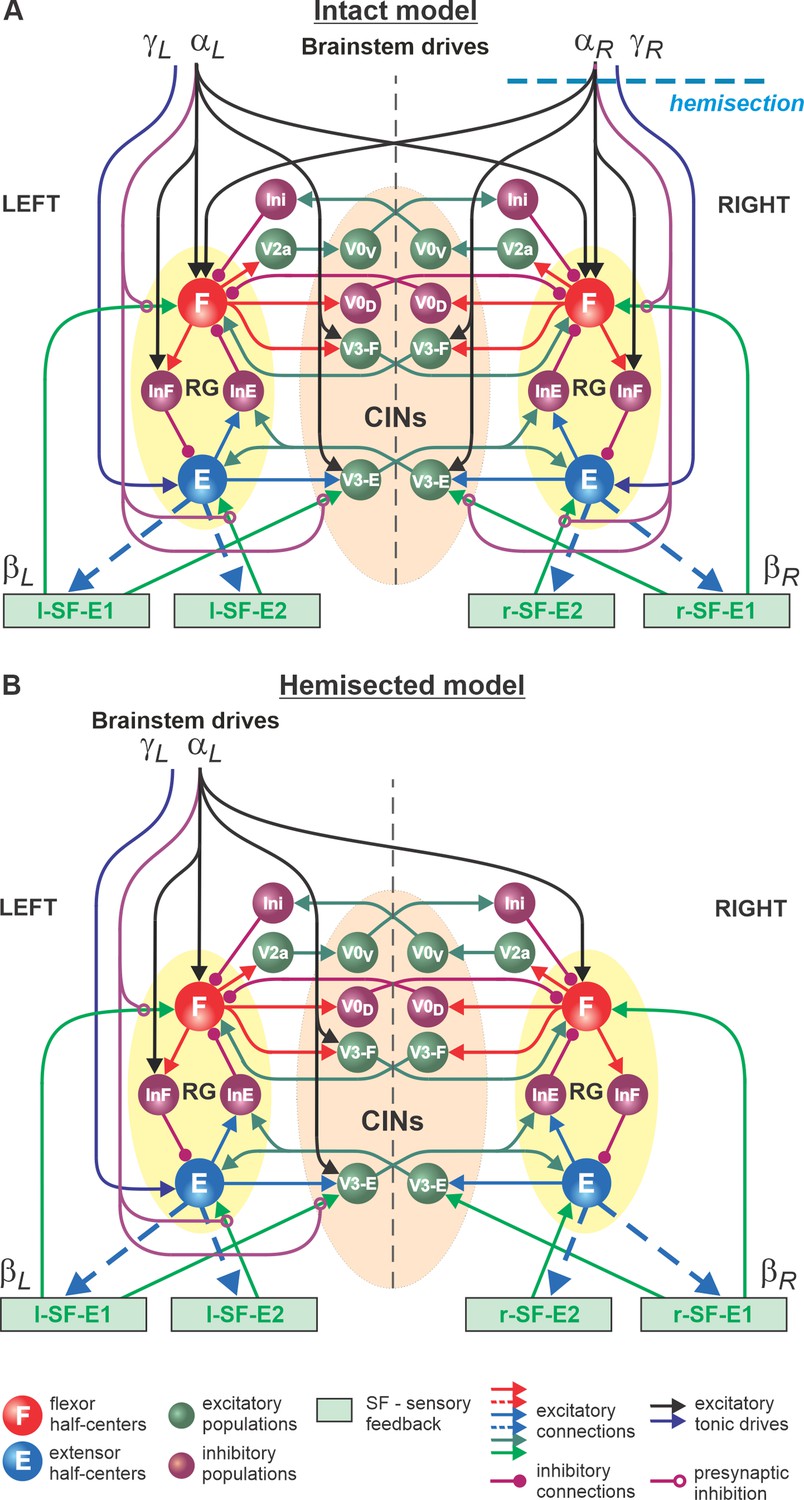
Model of spinal circuits controlling treadmill locomotion.
(A) Model of the intact system (‘intact model’). The model includes two bilaterally located (left and right) rhythm generators (RGs) (each is similar to that shown in Rybak et al., 2024, Figure 3C) coupled by (interacting via) several commissural pathways mediated by genetically identified commissural (V0D, V0V, and V3) and ipsilaterally projecting excitatory (V2a) and inhibitory neurons (see text for details). Left and right excitatory supraspinal drives and ) provide activation for the flexor half-centers (F) of the RGs (ipsi- and contralaterally) and some interneuron populations in the model, as well as for the extensor half-centers (E) ( and ipsilaterally). Two types of feedback (SF-E1 and SF-E2) operating during extensor phases affect (excite), respectively, the ipsilateral F (SF-E1) and E (SF-E2) half-centers, and through V3-E neurons affect contralateral RGs. The SF-E1 feedback depends on the speed of the ipsilateral ‘belt’ or ) and contributes to the extension-to-flexion transition on the ipsilateral side. The SF-E2 feedback activates the ipsilateral E half-center and contributes to ‘weight support’ on the ipsilateral side. The ipsilateral excitatory drives () suppress the effects of all ipsilateral feedback inputs by presynaptic inhibition. The detailed description and all model parameters can be found in the preceding paper (Rybak et al., 2024). (B) Model of the right-hemisected system. All supraspinal drives on the right side (and their suppression of sensory feedback from the right limb) are eliminated from the schematic shown in (A).
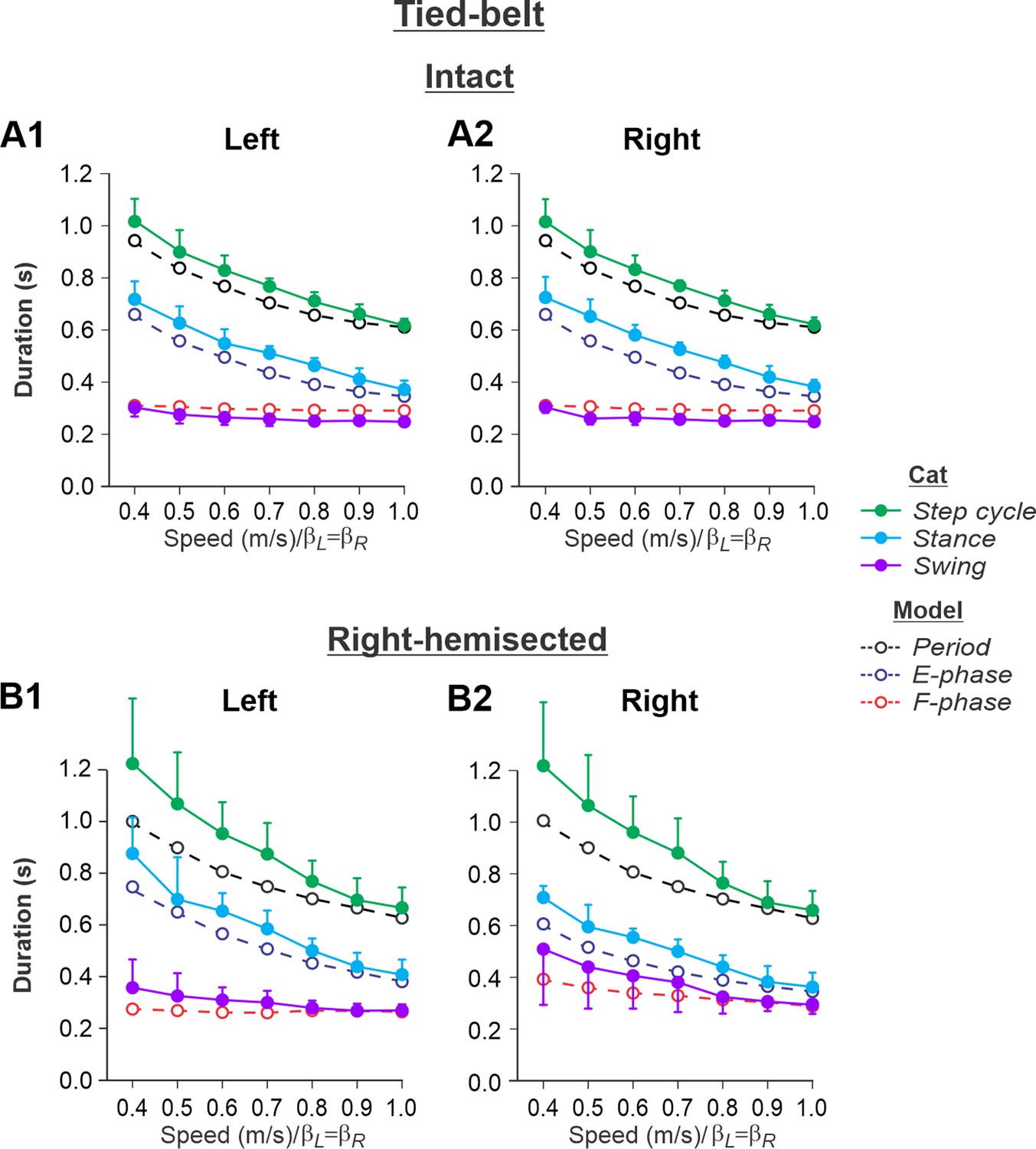
Figure 2
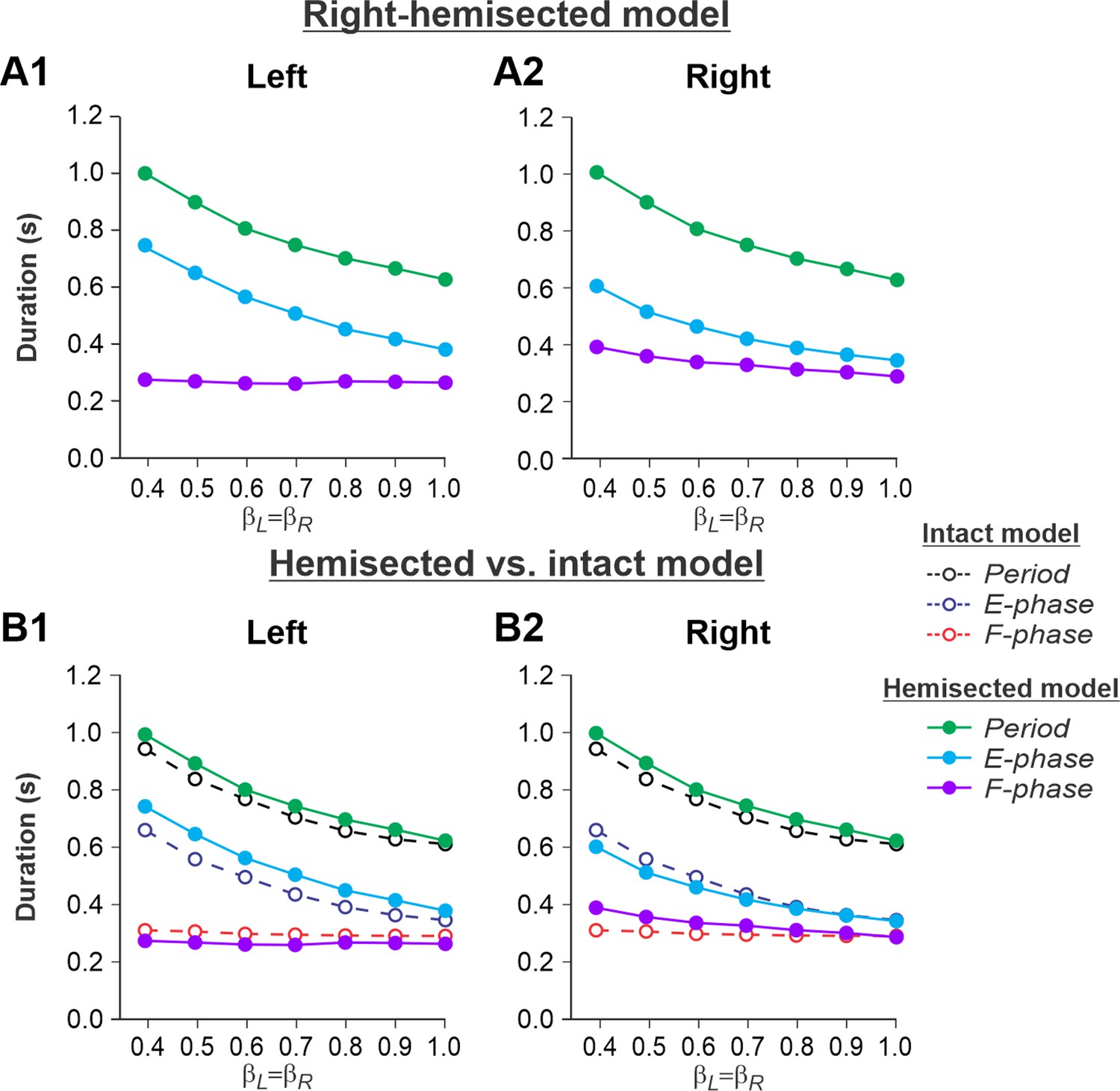
Simulation of locomotion on a tied-belt treadmill using the right-hemisected model.
(A1, A2) Changes in the durations of cycle period and extensor/stance and flexor/swing phases during simulated tied-belt locomotion on the left contralesional (A1) and right ipsilesional (A2) sides of the model with an increasing simulated treadmill speed. (B1, B2) The curves from panels (A1) and (A2) for the hemisected model are superimposed with the corresponding curves obtained from the intact model (modified from Rybak et al., 2024, Fig. 5A).
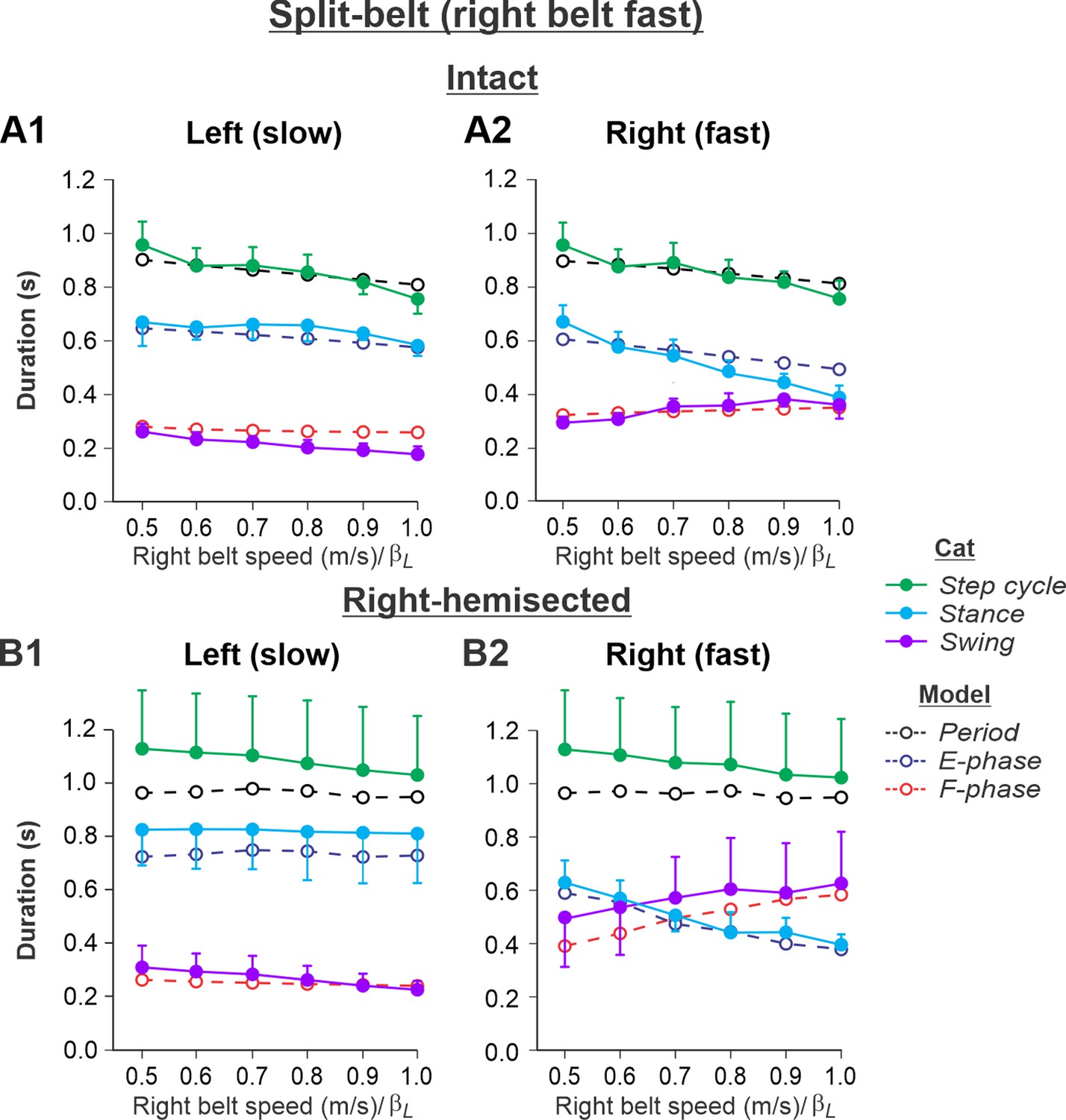
Figure 3
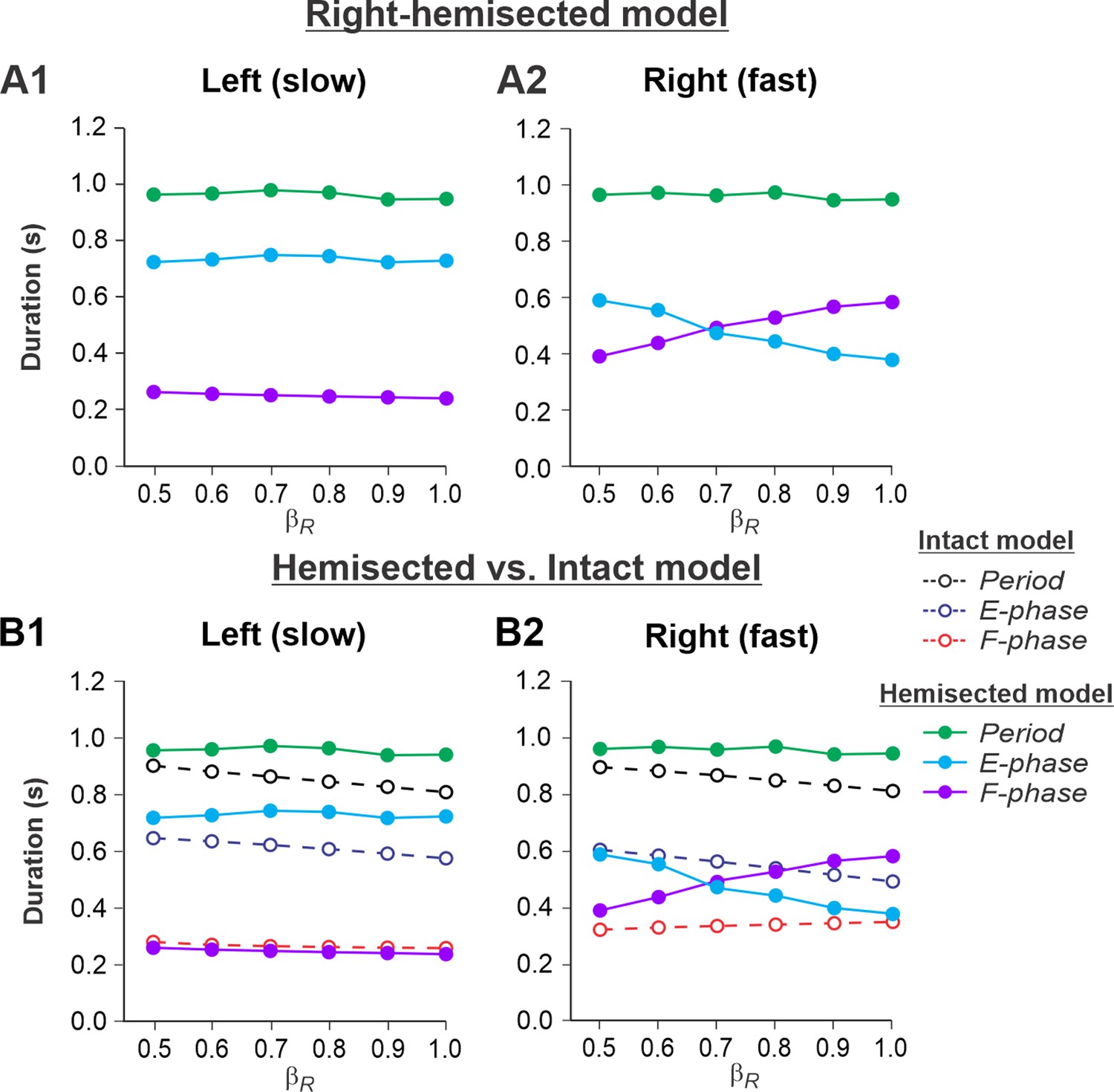
Simulation of locomotion on a split-belt treadmill using the right-hemisected model in the Left slow/Right fast condition, with the ipsilesional hindlimb stepping on the fast belt.
(A1, A2) Changes in the durations of cycle period and extensor/stance and flexor/swing phases during simulated split-belt locomotion on the left contralesional (A1) and right ipsilesional (A2) sides of the model. (B1, B2) The curves from panels (A1) and (A2) for the hemisected model are superimposed with the corresponding curves obtained from the intact model (modified from Rybak et al., 2024, Fig. 5A).
Figure 4
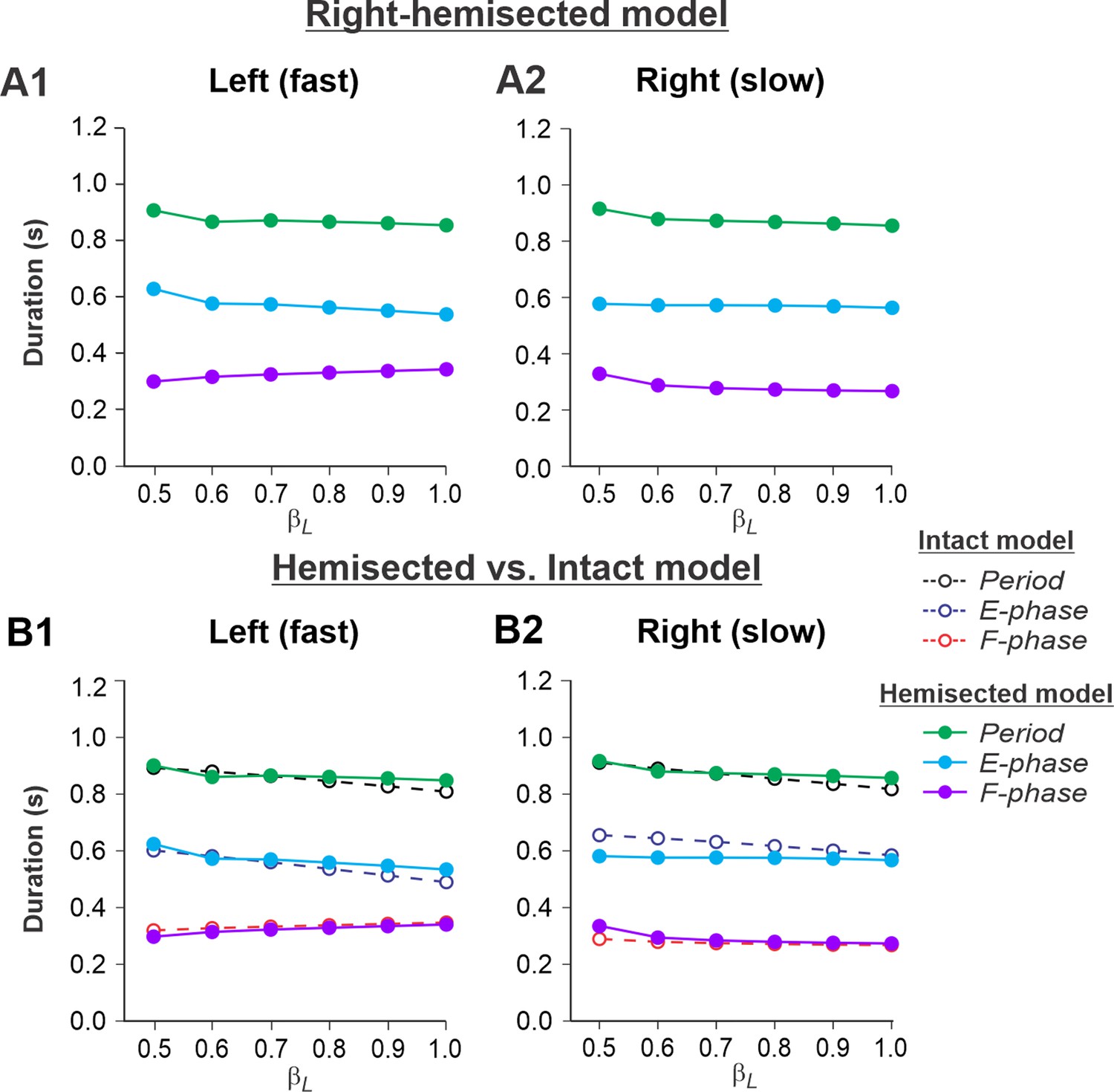
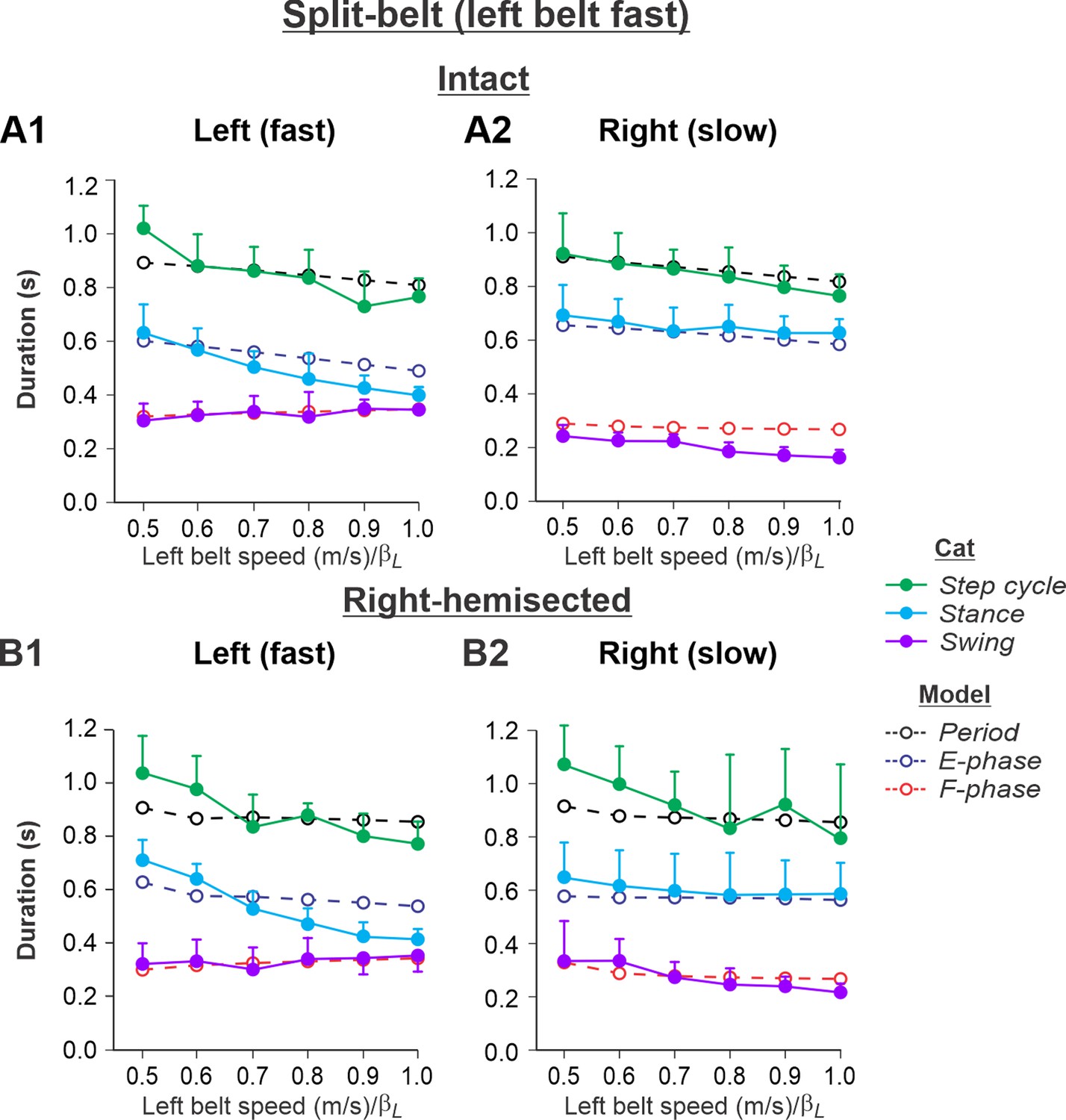
Simulation of locomotion on a split-belt treadmill using the right-hemisected model in the Left fast/Right slow conditions, with the ipsilesional hindlimb stepping on the slow belt.
(A1, A2) Changes in the durations of locomotor period and extensor/stance and flexor/swing phases during simulated split-belt locomotion on the left contralesional (A1) and right ipsilesional (A2) sides of the model. (B1, B2) The curves from panels (A1) and (A2) for the hemisected model are superimposed with the corresponding curves obtained from the intact model (modified from Rybak et al., 2024, Fig. 5A).
Figure 5 with 1 supplement
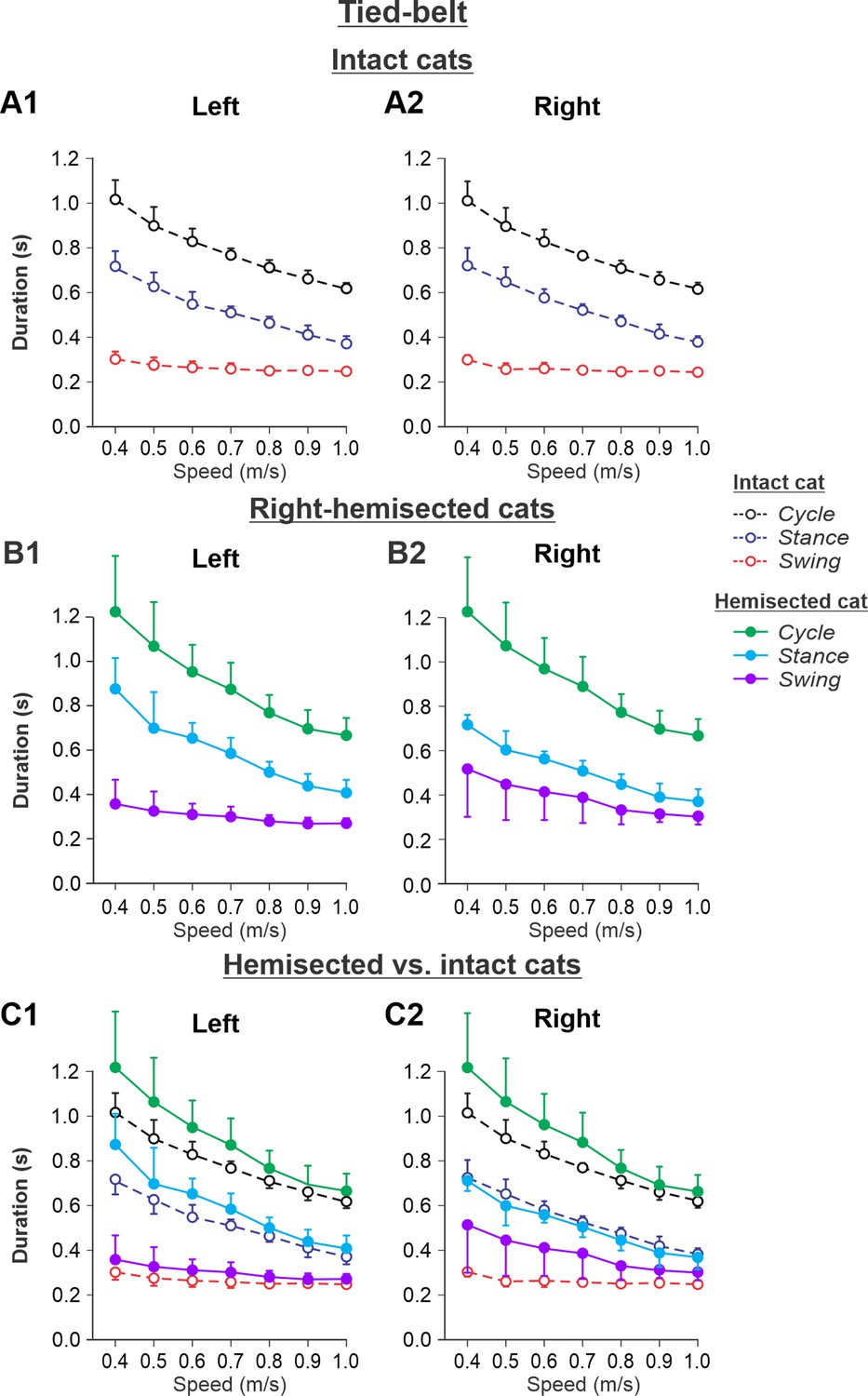
Cycle and phase durations before and after a right thoracic lateral hemisection in cats walking on a tied-belt treadmill.
(A1, A2) Changes in the durations of cycle period and stance and swing phases during tied-belt locomotion in intact cats (before hemisection). (B1, B2) The same characteristics obtained from cats 7–8 weeks after a right lateral thoracic hemisection. (C1, C2) The curves from panels (B1) and (B2) for hemisected cats are superimposed (for comparison) with the corresponding curves (A1, A2) obtained from intact cats.
Figure 5—figure supplement 1
Comparison of simulated and experimental data during tied-belt locomotion.
Figure 6 with 1 supplement
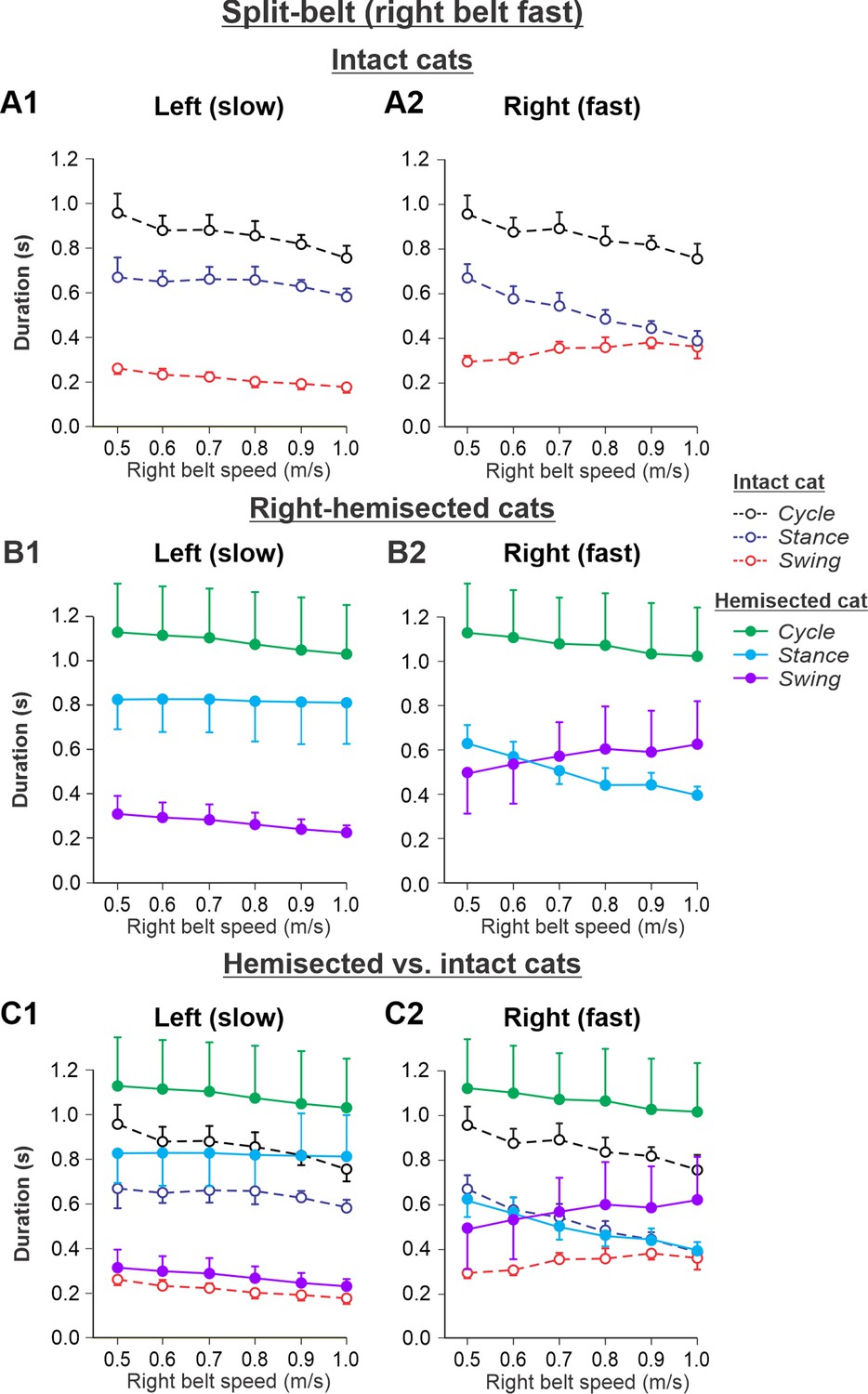
Cycle and phase durations before and after a right thoracic lateral hemisection in cats walking on a split-belt treadmill in the Left slow/Right fast condition, with the ipsilesional hindlimb stepping on the fast belt.
(A1, A2) Changes in the durations of cycle period and stance and swing phases during split-belt locomotion in intact cats (before hemisection). (B1, B2) The same characteristics obtained from cats 7–8 weeks after a right lateral thoracic hemisection. (C1, C2) The curves from panels (B1) and (B2) for injured cats are superimposed (for comparison) with the corresponding curves (A1, A2) obtained from intact cats.
Figure 6—figure supplement 1
Comparison of simulated and experimental data during split-belt locomotion in the Left slow/Right fast condition.
Figure 7 with 1 supplement
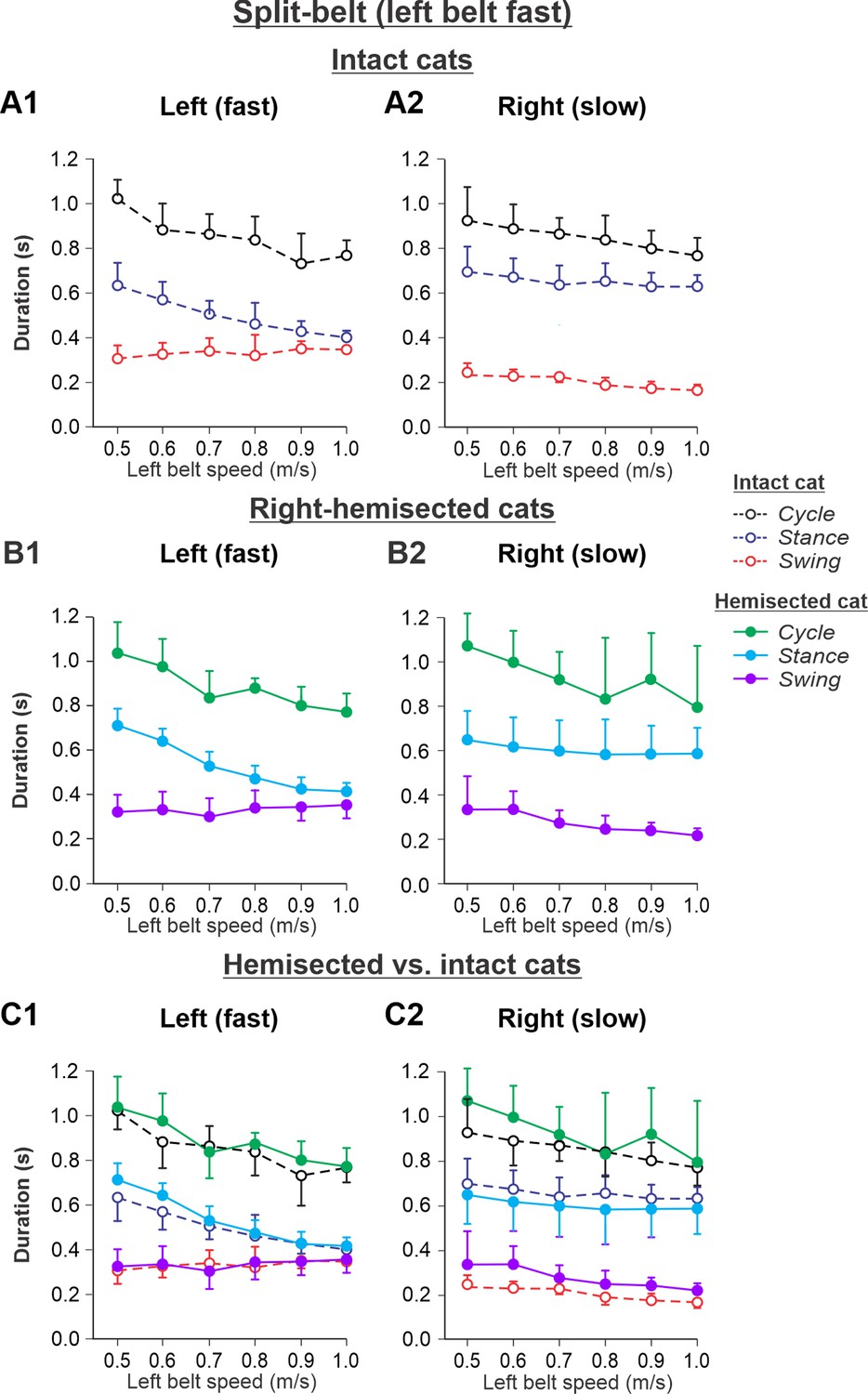
Cycle and phase durations before and after a right thoracic lateral hemisection in cats walking on a split-belt treadmill in the Left fast/Right slow condition, with the ipsilesional hindlimb stepping on the slow belt.
(A1, A2) Changes in the durations of cycle period and stance and swing phases during split-belt locomotion in intact cats (before hemisection). (B1, B2) The same characteristics obtained from cats 7–8 weeks after a right lateral thoracic hemisection. (C1, C2) The curves from panels (B1) and (B2) for injured cats are superimposed (for comparison) with the corresponding curves (A1, A2) obtained from intact cats.
Figure 7—figure supplement 1
Comparison of simulated and experimental data during split-belt locomotion in the Left fast/Right slow condition.
Additional files
Download links
A two-part list of links to download the article, or parts of the article, in various formats.
Downloads (link to download the article as PDF)
Open citations (links to open the citations from this article in various online reference manager services)
Cite this article (links to download the citations from this article in formats compatible with various reference manager tools)
Operation of spinal sensorimotor circuits controlling phase durations during tied-belt and split-belt locomotion after a lateral thoracic hemisection
eLife 13:RP103504.
https://doi.org/10.7554/eLife.103504.3




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}