BiteOscope, an open platform to study mosquito biting behavior
- Department of Bioengineering, Stanford University, United States
- Insect-Virus Interactions Unit, Institut Pasteur, UMR2000, CNRS, France
- Center for research and Interdisciplinarity, U1284 INSERM, Université de Paris, France
Figures
Figure 1 with 2 supplements
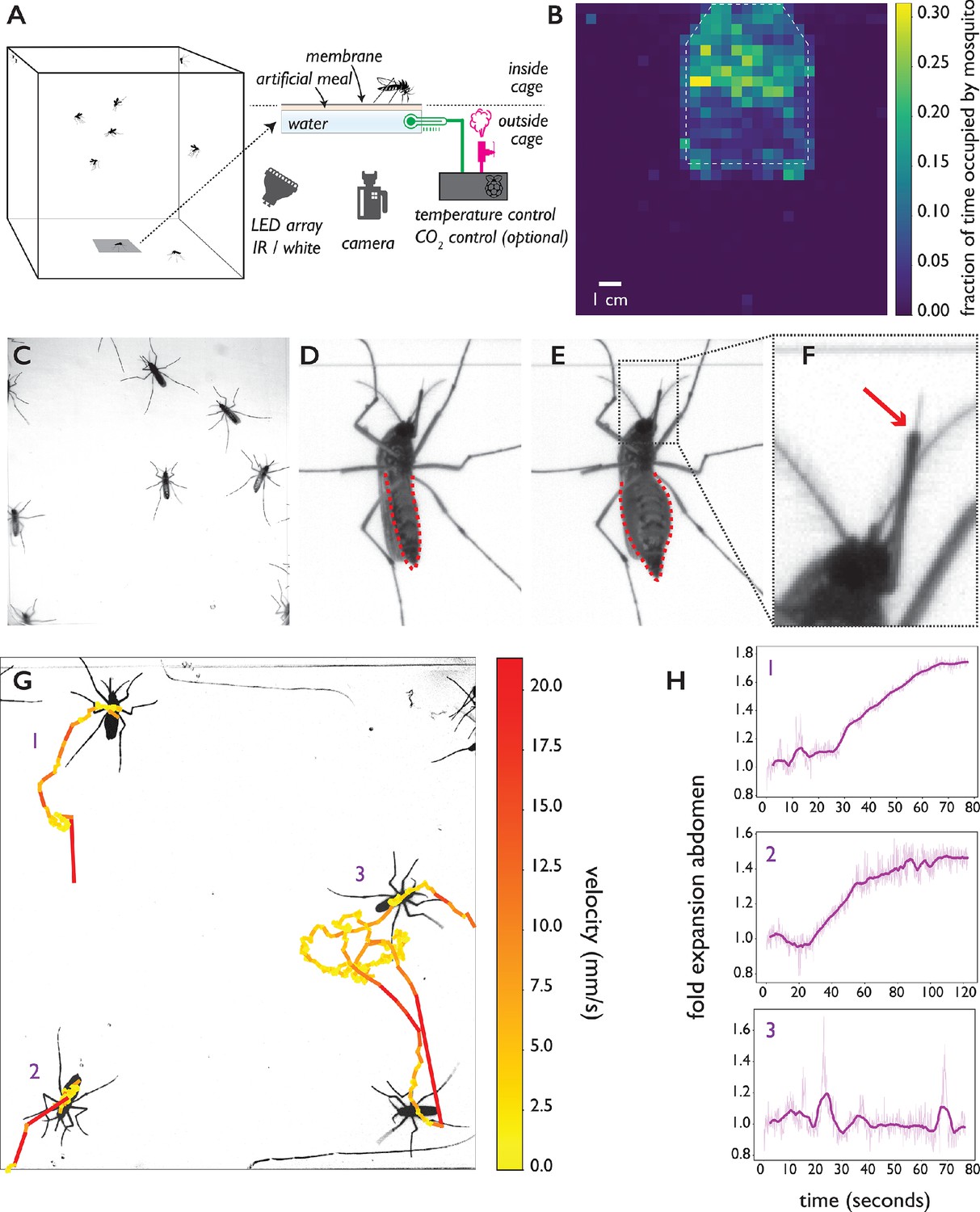
The biteOscope.
(A) Schematic of the set up. The bite substrate consists of a water bath (cell culture flask) that is mounted in the floor or wall of a cage, allowing freely flying mosquitoes access. An artificial meal is applied on the outside surface of the culture flask and covered using a Parafilm membrane, water in the flask is temperature controlled using a Raspberry Pi reading a temperature probe, and a Peltier element for heating (0.1 accuracy). The Raspberry Pi optionally controls the inflow of gas. Illumination is provided by an array of white or IR LEDs. A camera and lens situated outside the cage images mosquitoes (abdominal view) through the bite substrate. (B) Two-dimensional histogram (heatmap) showing mosquito presence on the bite substrate (indicated with a dashed line) and on the surrounding wall. Mosquitoes spend more time on the bite surface. (C) Raw image of Ae. aegypti on the bite substrate. (D-F) Images of an Ae. aegypti mosquito that has pierced the membrane and inserted its stylet into the meal. After imbibing, the abdomen dilates. The red arrow in (F) indicates the tip of the labium where the stylets (visible as a thin needle-like structure) pierce the surface and enter the artificial meal. (G) Tracks showing movement of Ae. aegypti on the bite substrate, color of tracks indicates velocity. (H) Fold expansion of the abdomen over time, indicating full engorgement in mosquitoes 1 and 2, and no feeding in mosquito 3 of panel (G).
Figure 1—figure supplement 1

Schematic of bite substrate assembly.
Assembly of the bite substrate. Step 1: The artificial meal is applied to the top surface of a flask containing degassed water (for the top surface of a 70 mL falcon tissue culture flask, a volume of approximately 1.6 mL is used). Step 2: The liquid is spread with a pipette tip to cover the entire top surface of the flask, and a rectangular section of Parafilm is stretched to approximately twice its original size (in x and y direction). Step 3: The Parafilm is stretched over the top surface of the flask to create a liquid cell and secured on the sides of the flask (by gently pressing). Step 4: A 5 mm wide ribbon of Parafilm is wrapped around the edge of the flask to provide additional support against leaking, the Peltier element (heating) is attached to the side of the flask using tape, and the temperature probe is inserted in the flask.
Figure 1—figure supplement 2

Overview of the computational pipeline.
Figure 2 with 1 supplement
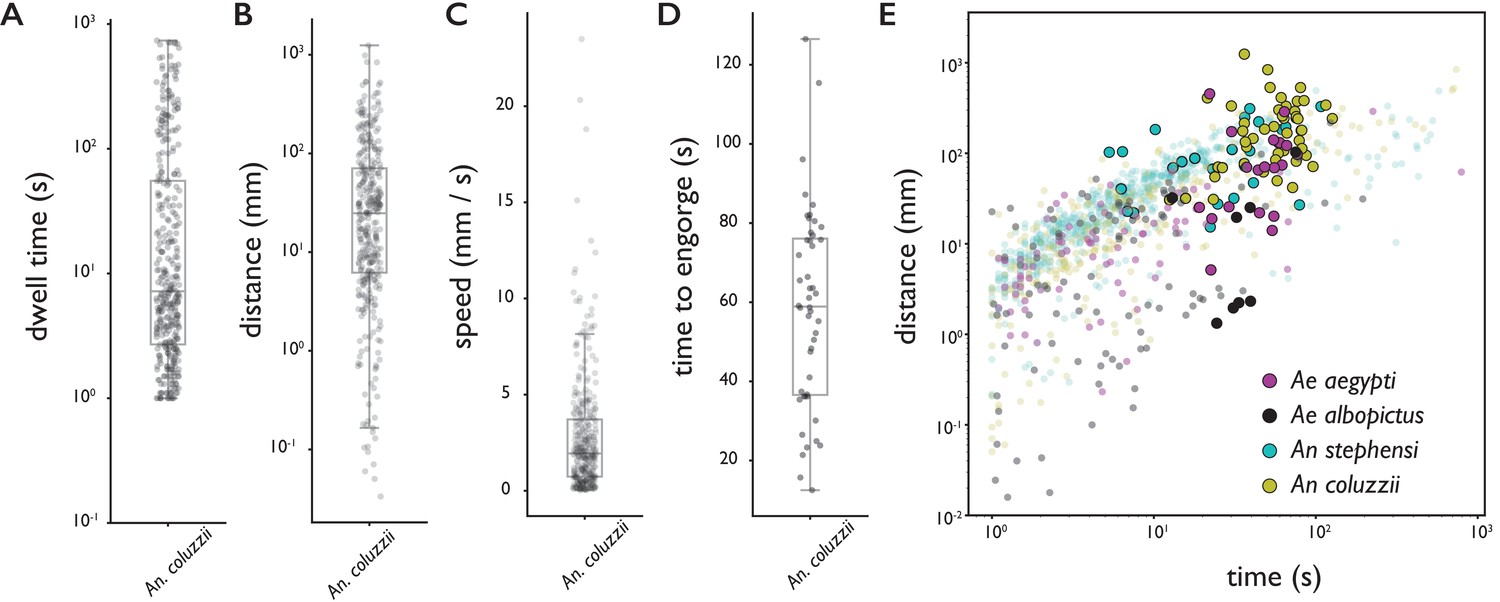
Behavioral statistics of An. coluzzii (A–D) and all four species (E).
Each datapoint is derived from an individual trajectory, boxes indicate quartiles. (A) The time spent on the bite surface (). (B) The total distance covered walking on the surface during a trajectory (). (C) The mean velocity during a trajectory (). (D) The time from landing to full engorgement (for trajectories leading to full engorgement, ). (E) The duration of a trajectory (total time for trajectories not leading to engorgement (transparent dots), time to full engorgement for trajectories that led to full engorgement (opaque circles)) versus the distance covered during that trajectory. The different colors denote different species, Ae. aegypti: magenta, Ae. albopictus: black, An. stephensi: cyan, An. coluzzii: yellow.
-
Figure 2—source data 1
Source data for all four species provided as Pandas DataFrames.
- https://cdn.elifesciences.org/articles/56829/elife-56829-fig2-data1-v2.zip
Figure 2—figure supplement 1

Behavioral statistics of Ae. aegypti, Ae. albopictus, An. stephensi, and An. coluzzii.
Each datapoint is derived from an individual trajectory. (A) The time spent on the bite surface. (B) The total distance covered walking on the surface during this time. (C) The mean velocity during a trajectory. (D) The time from landing to full engorgement (for trajectories leading to full engorgement).
Figure 3 with 1 supplement

Feeding behavior of individual Ae. albopictus.
(A, B) Ethograms of individual Ae. albopictus interacting with a bite substrate offering a PBS only meal, (A), and a meal consisting of PBS + 1 mM ATP, (B). Distinct exploratory bouts appear as continuous blocks in the ethogram and are labeled according to the behavior being displayed: flight (yellow), walking (purple), and stationary (dark blue), the time of engorgement to full repletion is marked by a black box and a white asterix. (C) Behavioral statistics of the data displayed in A and B showing the total time spent on the bite substrate (left, no significant difference , Wilcoxon rank-sum test), the number of exploratory bouts undertaken (middle, significantly different , Wilcoxon rank-sum test), and the length of individual bouts (right, significantly different , Wilcoxon rank-sum test), of Ae. albopictus exploring the PBS only substrate (labeled 0) and those that engorged to full repletion on the PBS + ATP substrate (labeled 1). Individual data points are shown in purple, the mean and associated 95% confidence interval are depicted by a black dot and bar, respectively. Individuals that were offered the PBS + ATP substrate but did not feed to full repletion were excluded from this analysis.
-
Figure 3—source data 1
Source data for all experiments with individual Ae. albopictus females.
- https://cdn.elifesciences.org/articles/56829/elife-56829-fig3-data1-v2.zip
Figure 3—figure supplement 1
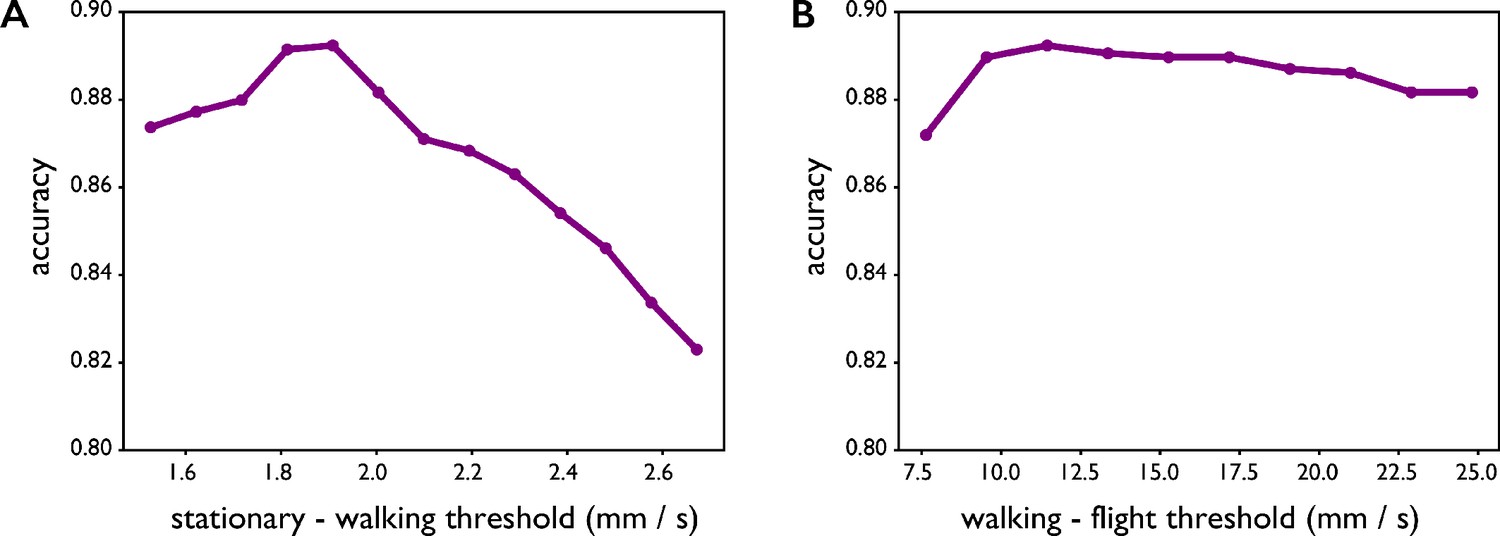
The accuracy of automatic classification of locomotion behaviors (stationary, walking, flight) is 89% and exceeds 80% for a range of parameter values.
The accuracy of automatic classification of locomotion behaviors (stationary, walking, flight) presented in Figure 3A,B is 89% and exceeds 80% for a range of parameter values. (A) Threshold used to distinguish stationary from walking. (B) Threshold used to distinguish walking from flight.
Figure 4 with 4 supplements
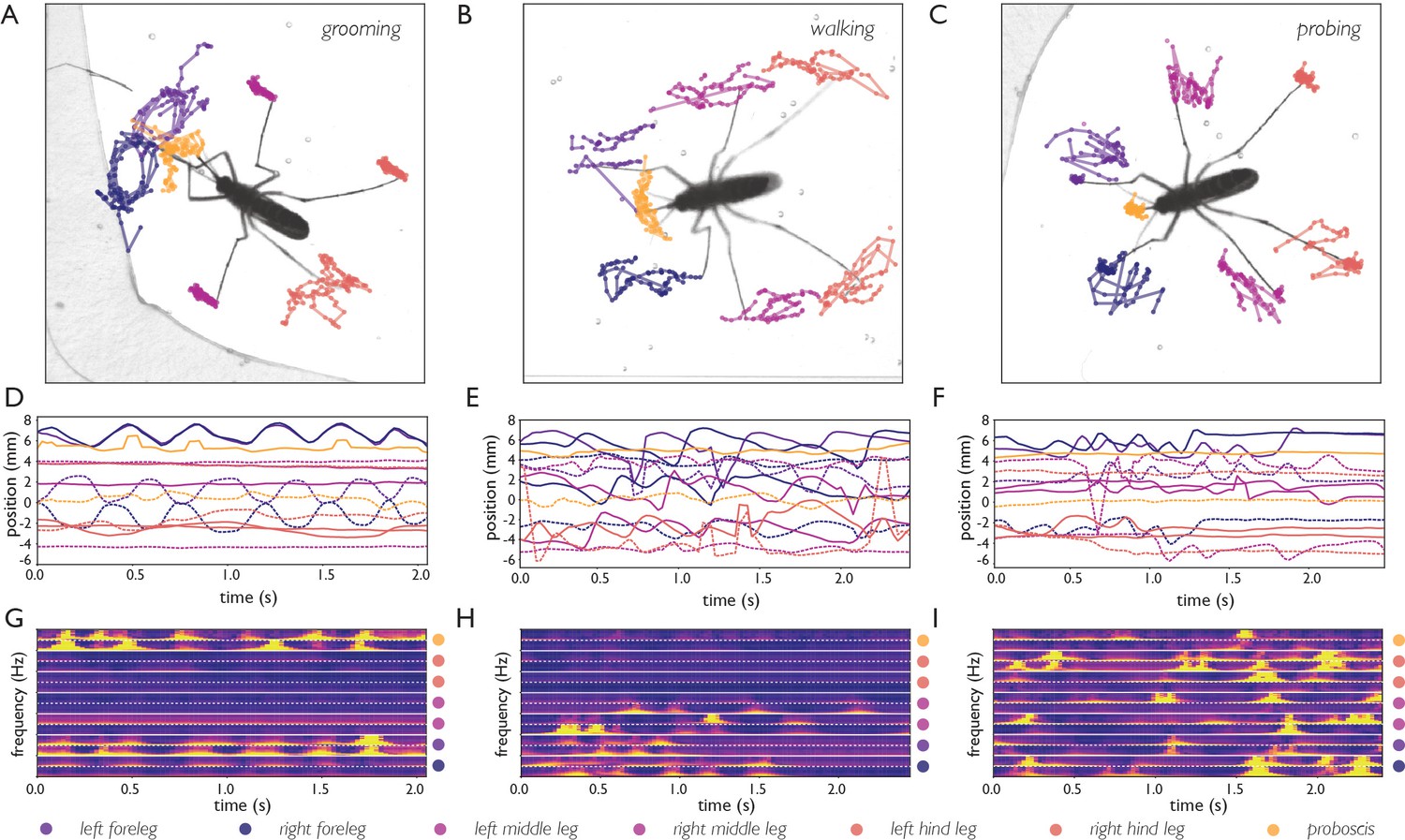
Body part tracking reveals movement patterns of specific behaviors.
Color coding of plots in panels A-F are displayed at the bottom of the figure. (A–C) Trajectories of the tips of the six legs and proboscis of an Ae. albopictus female grooming her antennae (A), walking (B), and probing (C). (D–F) Time traces showing egocentric x (full lines) and y (dashed lines) coordinates of the body parts of mosquitoes shown in A-C. Anterior grooming is characterized by smooth periodic movement in the x and y planes. During walking the x-coordinate shows a swing that alternates between fore, middle, and hind leg; probing shows rapid pulling of the fore and middle legs towards the body. (G–I) Continuous wavelet transforms of the body part coordinates highlight the periodicity of movements. The amplitude of the spectrogram is indicated by the color, going from low (purple) to high (yellow). Yellow bands indicate periodic movement of a body part. Spectrograms of the seven body parts are stacked and separated by white lines (color coding on the right shows stacking order, with the x-coordinate of the body part on top, and y-coordinate on the bottom (x, and y coordinates are separated by a dashed line)).
Figure 4—figure supplement 1
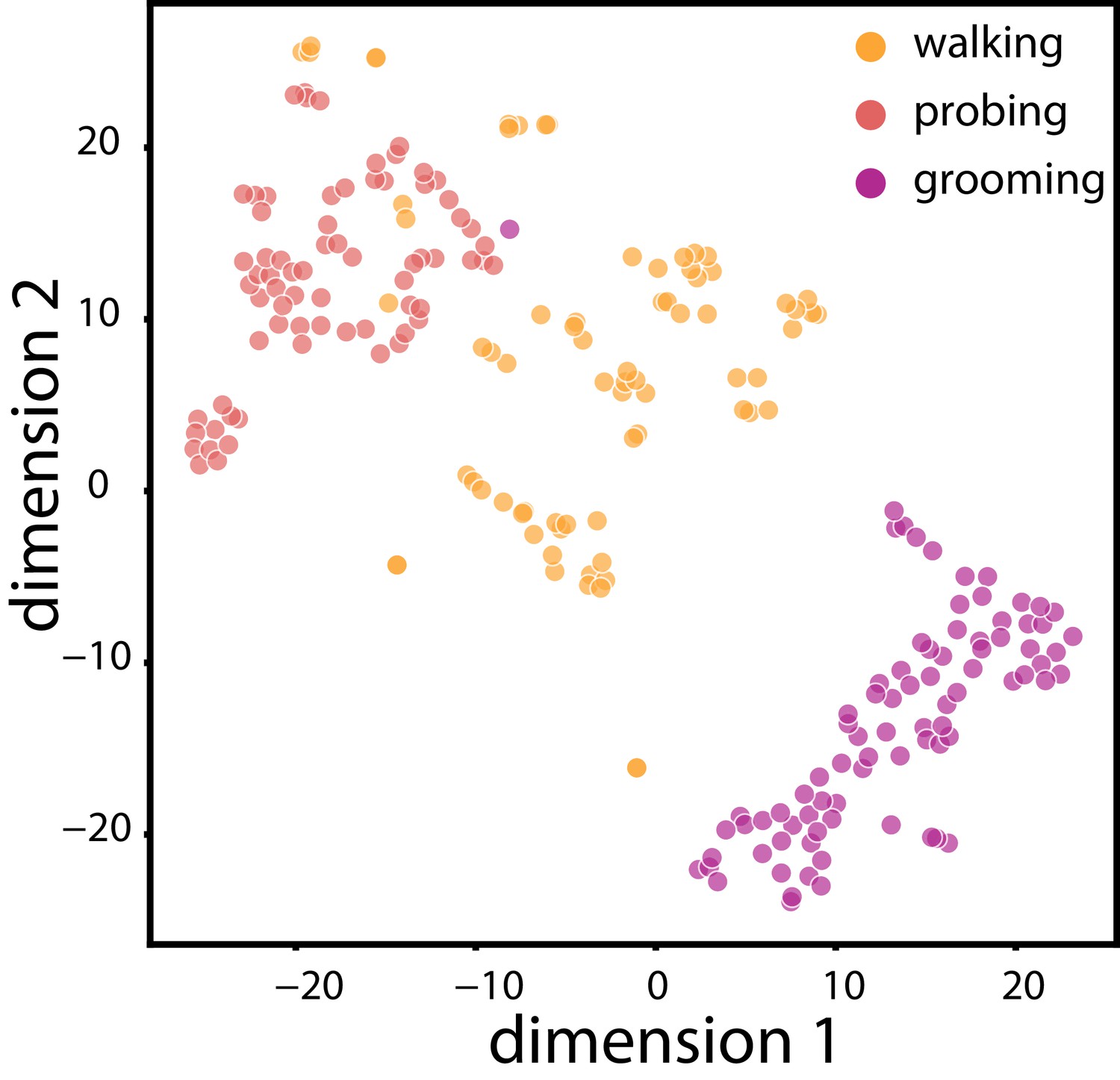
Two-dimensional embedding of data shown in A-I.
Two-dimensional embedding of the body part coordinates and their wavelet transforms (data from Figure 4) using t-SNE. Data points are color coded according to the behavior displayed (manually labelled) and show three distinct clusters for grooming, walking, and probing. The clustering of the data points demonstrates the richness of the data obtained from body part tracking and indicates that clustering body part coordinates and derived features may be a feasible method to classify behaviors. Robust unsupervised classification using such methods requires a larger dataset than the one presented here.
Figure 4—video 1
Body part tracking of Ae. albopictus anterior grooming, corresponding to Figure 4A,D,G.
Video playing in real time. Grooming of the antennae and proboscis is characterized by a circular motion of the forelegs, and corresponding movement of the head. The middle and hind legs remain stationary during this behavior.
Figure 4—video 2
Body part tracking of Ae. albopictus walking, corresponding to Figure 4B,E,H.
Video playing in real time. The stride sequence of Ae. albopictus, in which fore, middle, and hind legs swing in sequence, is visible.
Figure 4—video 3
Body part tracking of Ae. albopictus probing, corresponding to Figure 4C,F,I.
Video playing in real time. While probing, all four species show rapid pulling motion of the legs toward the head (here a typical video of Ae. albopictus is shown). After the membrane is pierced, the location of the proboscis remains stationary.
Figure 5
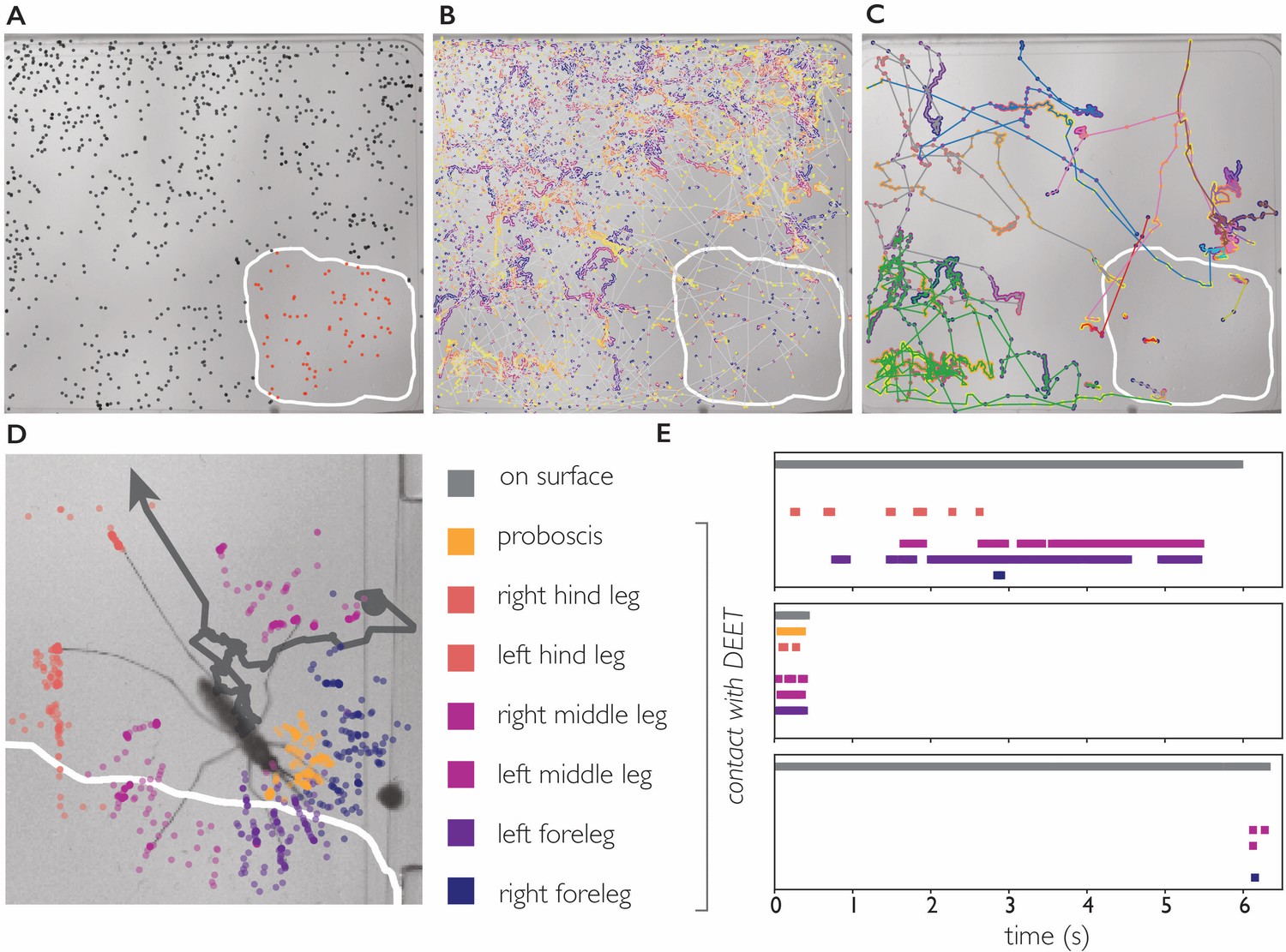
DEET repels An. coluzzii on contact with legs.
(A) Landings on a substrate partly coated with 50% DEET (white line indicates DEET-coated surface). Black dots indicate landings outside the DEET area, red dots indicate landings inside the DEET area. The landing rate in the DEET area is approximately 1.9 times lower compared to the non-treated surface. (B) Trajectories of mosquito movement on the surface. Dots of individual tracks are colored from purple (start of the track) to yellow (end of the track). An. coluzzii on average spend seven times longer on the non-coated surface compared to the DEET-coated surface. (C) Example tracks of mosquitoes landing on the non-treated area and subsequently entering the DEET-coated area. (D) Body part tracking of a mosquito near the edge of the DEET-coated surface. The grey line indicates the movement of the center of mass of the mosquito (a dot indicates the start of the track, arrowhead departure). Colored dots indicate the position of the legs and proboscis during the section of the trajectory where the mosquito is within reach of the DEET-coated area (indicated by the white line). (E) Ethogram showing typical behavioral patterns when a mosquito comes in contact with DEET. The grey bar (top) indicates that a mosquito is anywhere on the surface (including the uncoated area), the colored bars indicate contact of a specific appendage with DEET. The top panel corresponds to the mosquito shown in (D) illustrating a mosquito that walks toward the DEET area, contacts it with several legs, and flies away. The middle panel is an example of ‘touch and go’ contact in which a mosquito lands on the DEET area, contacts it with several legs and proboscis, and takes off. The bottom panel shows a mosquito that after a long exploratory bout outside the DEET area, takes off as soon as the right foreleg and both middle legs contact the DEET area.
Videos
Video 1
Ae. albopictus female landing, probing, and feeding to full repletion.
Upon landing, the mosquito walks/explores the substrate for a short period to pierce the surface and insert her stylets, clearly visible as a flexible needle. The video shows a fast pulling motion of the fore and hind legs towards the body which is typical during the probing phase. While engorging, the body remains nearly motionless and the abdomen dilates visibly.
Video 2
An Ae. aegypti female lands, probes (visible as a pulling motion towards the body), walks several millimeters, probes again, and finally starts to engorge.
Engorgement is clearly visible as a dilation of the abdomen. Video playing in real time.
Video 3
Several An. stephensi females explore the bite substrate, two feed to repletion.
The individual that initiates feeding in the top right corner of the frame stops engorging half way, and subsequently moves to the left side of the frame to continue engorging. Video playing in real time.
Video 4
Several An. coluzzii explore interact with the bite substrate, two feed to repletion.
Both Anopheles species quickly concentrate the obtained meal by excreting liquid (visible as a growing excretion droplet), Aedes excrete small droplets as well, yet to a much smaller extent. Video playing in real time.
Video 5
The stylet of an Ae. aegypti female evaluates the artificial meal it finds after piercing the membrane.
The stylet is a flexible organ that bends, extends, and retracts in the liquid. Video playing in real time.
Video 6
Tracking the centroid of Ae. aegypti.
The color of the centroid and the trail is a measure for the instantaneous velocity of the animal.
Video 7
Centroid tracking of An. coluzzii.
Example of a validation video for tracking data playing at 2.5 times reduced speed. Numerical IDs are assigned to mosquitoes and shown overlaid on the original data (the position of the centroid is indicated in the same color as the ID).
Video 8
The abdomen of an Ae. aegypti female expands dramatically during blood feeding.
Fitting an active contour model to the mosquito body (after computationally removing appendages) provides the abdomen width (and other shape parameters) which can be used to estimate engorgement status.
Video 9
Ae. albopictus female walking onto the bite substrate (artificial meal of PBS without ATP), probing the substrate several times, and moving away.
Video playing in real time.
Video 10
Ae. albopictus female exploring the surface of PBS only feeder (without ATP).
While walking, the proboscis often moves laterally and taps the surface. Video playing in real time.
Video 11
An coluzzii landing on the DEET-coated surface and immediately taking off.
Video playing four times slower than real time. The majority of trajectories in which An. coluzzii comes into contact with the DEET-coated surface results in an immediate take off.
Video 12
An. coluzzii moving onto the DEET-coated surface.
Body part tracking shows that this female lands outside the DEET-coated area and subsequently her left fore and middle leg come into contact with the DEET-coated portion. After a short contact, the mosquito flies away.
Tables
Key resources table
| Reagent type (species) or resource | Designation | Source or reference | Identifiers | Additional information |
|---|---|---|---|---|
| Strain, strain background | ||||
| (Ae. aegypti ) | KPPTN | Lambrechts lab, Institut Pasteur | Thailand, G18 | |
| Strain, strain background | ||||
| (Ae. aegypti) | D2S3 | BEI resources | Puerto Rico x Nigeria cross | |
| Strain, strain background | ||||
| (Ae. aegypti) | Liverpool | Vosshall lab, Rockefeller University | West Africa | |
| Strain, strain background | ||||
| (Ae. albopictus) | BP | Lambrechts lab, Institut Pasteur | Vietnam, G23 | |
| Strain, strain background | ||||
| (An. stephensi) | Sda500 | CEPIA, Institut Pasteur, Paris | Pakistan | |
| Strain, strain background | ||||
| (An. coluzzii) | N’Gousso | CEPIA, Institut Pasteur, Paris | Cameroon | |
| Software, algorithm | biteOscope code | this paper | Hol, 2020 github.com/felixhol/biteOscope (copy archived at https://github.com/elifesciences-publications/biteOscope). | |
| Software, algorithm | DeepLabCut | Mathis et al., 2018 | version 2.0.9 |
Appendix 1—table 1
BiteOscope parts list.
The left columns describe the set-up as used for all experiments described in the paper, the right columns describe a low-cost alternative. Vendors are suggestions, costs are in US dollars and approximate.
| Item | Vendor | Part | Cost | Vendor | Part | Cost |
|---|---|---|---|---|---|---|
| Current | Low-cost | |||||
| General | ||||||
| DC power supply | Instek | GPD-3303D | 400 | home built | 25 | |
| linux computer | intel | NUC7i5BNK | 350 | NVIDIA | Jetson Nano | 100 |
| SSD | samsung | 970 Evo 500 GB | 180 | ScanDisk | 100 | |
| RAM | crucial | 16 GB | 100 | |||
| Illumination | ||||||
| LED array (bright field) | amazon | vidpro LED 312 | 80 | |||
| LED array (IR) | Taobao | 840/950 nm | 80 | Taobao | 840/950 nm | 80 |
| Imaging | ||||||
| camera | Basler | acA2040-90um | 1500 | TIS | DMK 37BUX178 | 350 |
| lens | canon | macro lens EF 100 mm | 600 | HIKVISION | MVL-HF3528M-6MP | 125 |
| lens coupler | fotodiox | pro lens mount EOS - c | 30 | |||
| Environmental control | ||||||
| Temp sensor | digikey | ds18b20 | 19 | 19 | ||
| peltier element | adafruit | 1330 | 12 | adafruit | 1330 | 12 |
| Solenoid valve (gas) | adafruit | 997 | 7 | adafruit | 997 | 7 |
| raspberry pi | amazon | 35 | 35 | |||
| relay switch | amazon | 6 | 6 | |||
| jumper wires | any | 8 | 8 | |||
| Half size bread board | any | 3 | 3 | |||
| alligator clips | any | 7 | any | 7 | ||
| Bite substrate | ||||||
| 70 ml culture flask | Falcon | 353109 | 1 | Falcon | 353109 | 1 |
| PBS | Sigma Aldrich | 1 | Sigma Aldrich | 1 | ||
| ATP | Sigma Aldrich | 1 | Sigma Aldrich | 1 | ||
| parafilm | Sigma Aldrich | 1 | Sigma Aldrich | 1 | ||
| Cage | ||||||
| Acrylic sheets | McMaster | Clear Cast | 30 | McMaster | Clear Cast | 30 |
| Total: | 3451 | 911 |
Additional files
Download links
A two-part list of links to download the article, or parts of the article, in various formats.
Downloads (link to download the article as PDF)
Open citations (links to open the citations from this article in various online reference manager services)
Cite this article (links to download the citations from this article in formats compatible with various reference manager tools)
BiteOscope, an open platform to study mosquito biting behavior
eLife 9:e56829.
https://doi.org/10.7554/eLife.56829




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}