High performance communication by people with paralysis using an intracortical brain-computer interface
- Stanford University, United States
- Emory University and Georgia Institute of Technology, United States
- Emory University, United States
- Massachusetts General Hospital, United States
- Brown University, United States
- Rehabilitation R&D Service, Department of VA Medical Center, United States
- Case Western Reserve University, United States
- Louis Stokes VA Medical Center, United States
- Harvard Medical School, United States
Figures
Figure 1 with 3 supplements
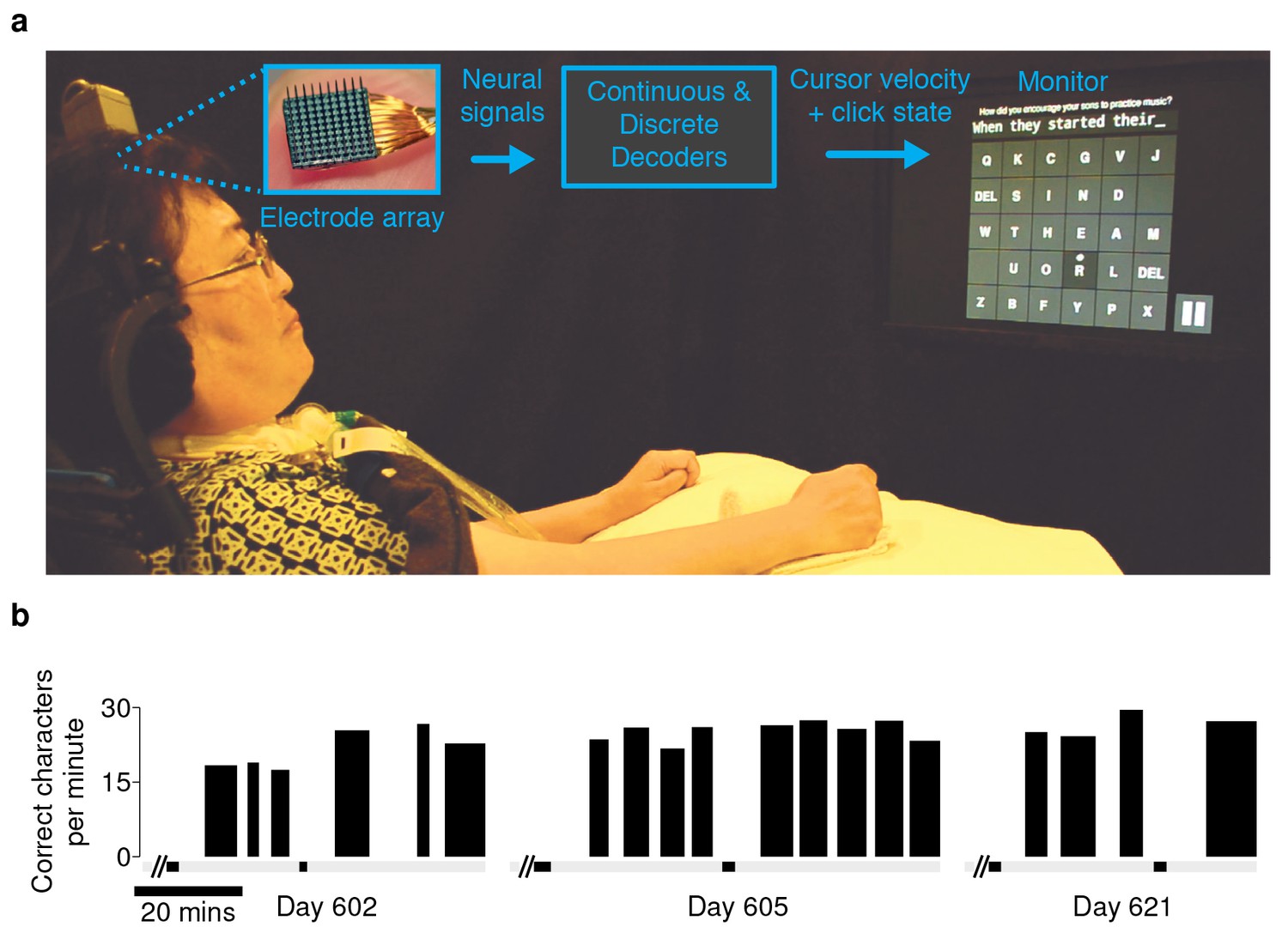
Experimental setup and typing rates during free-paced question and answer sessions.
(a) Electrical activity was recorded using 96-channel silicon microelectrode arrays implanted in the hand area of motor cortex. Signals were filtered to extract multiunit spiking activity and high frequency field potentials, which were decoded to provide ‘point-and-click’ control of a computer cursor. (b) Performance achieved by participant T6 over the three days that question and answer sessions were conducted. The width of each black bar represents the duration of that particular block. The black bands along the gray bar just below the black blocks denote filter calibration times. The average typing rate across all blocks was 24.4 ± 3.3 correct characters per minute (mean ± s.d.). Video 1 shows an example of T6’s free typing. The filter calibration and assessment stages that preceded these typing blocks are detailed in Figure 1—figure supplement 3.
Figure 1—figure supplement 1
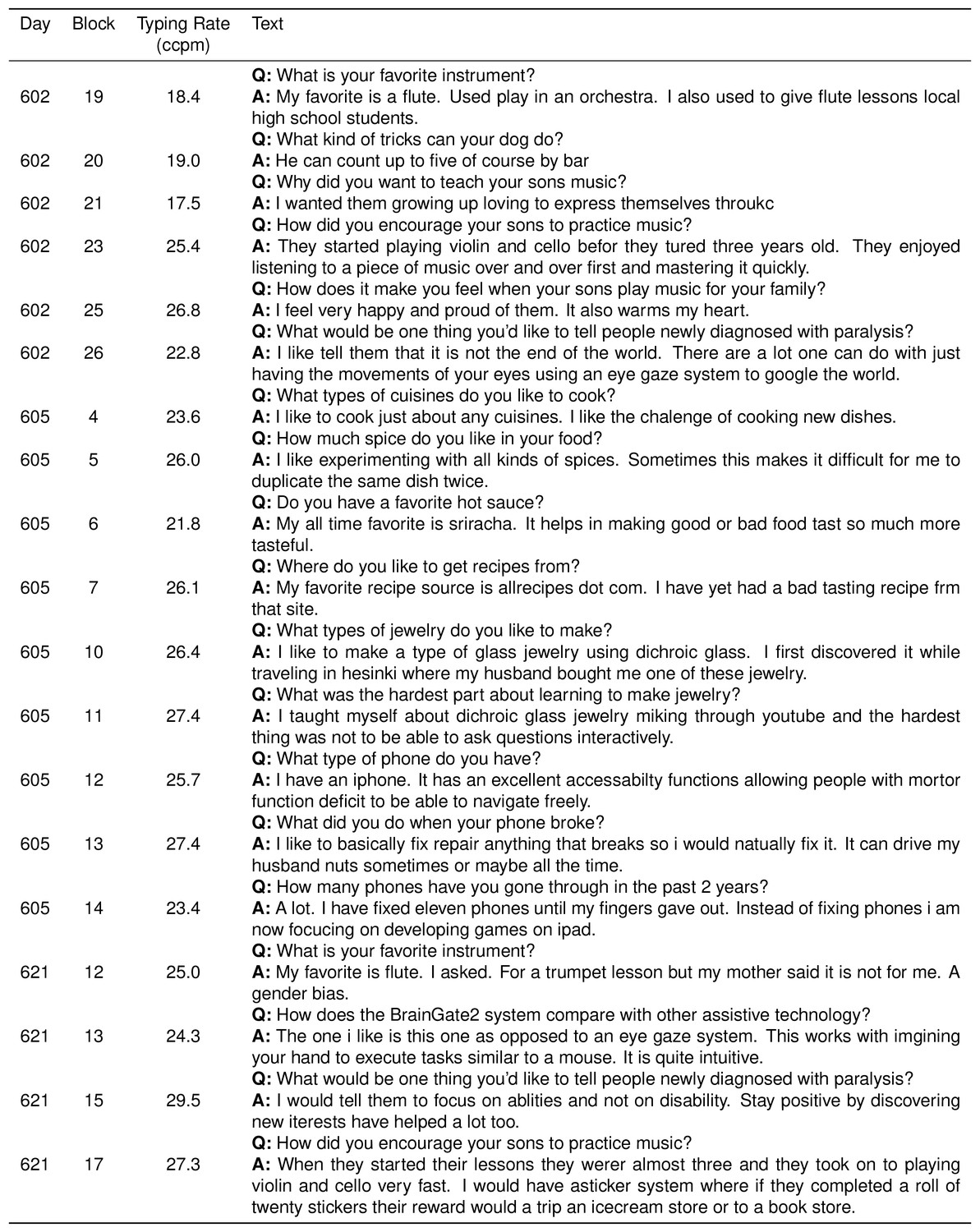
Participant T6’s typed responses during the question and answer sessions.
During these sessions, T6 was prompted with questions and formulated responses de novo. She could engage and disengage the interface using a play/pause button (see Video 1). In these sessions, two successive spaces resulted in the insertion of the ‘.’ character in place of the first space. Consent was obtained to release T6’s typed text.
Figure 1—figure supplement 2
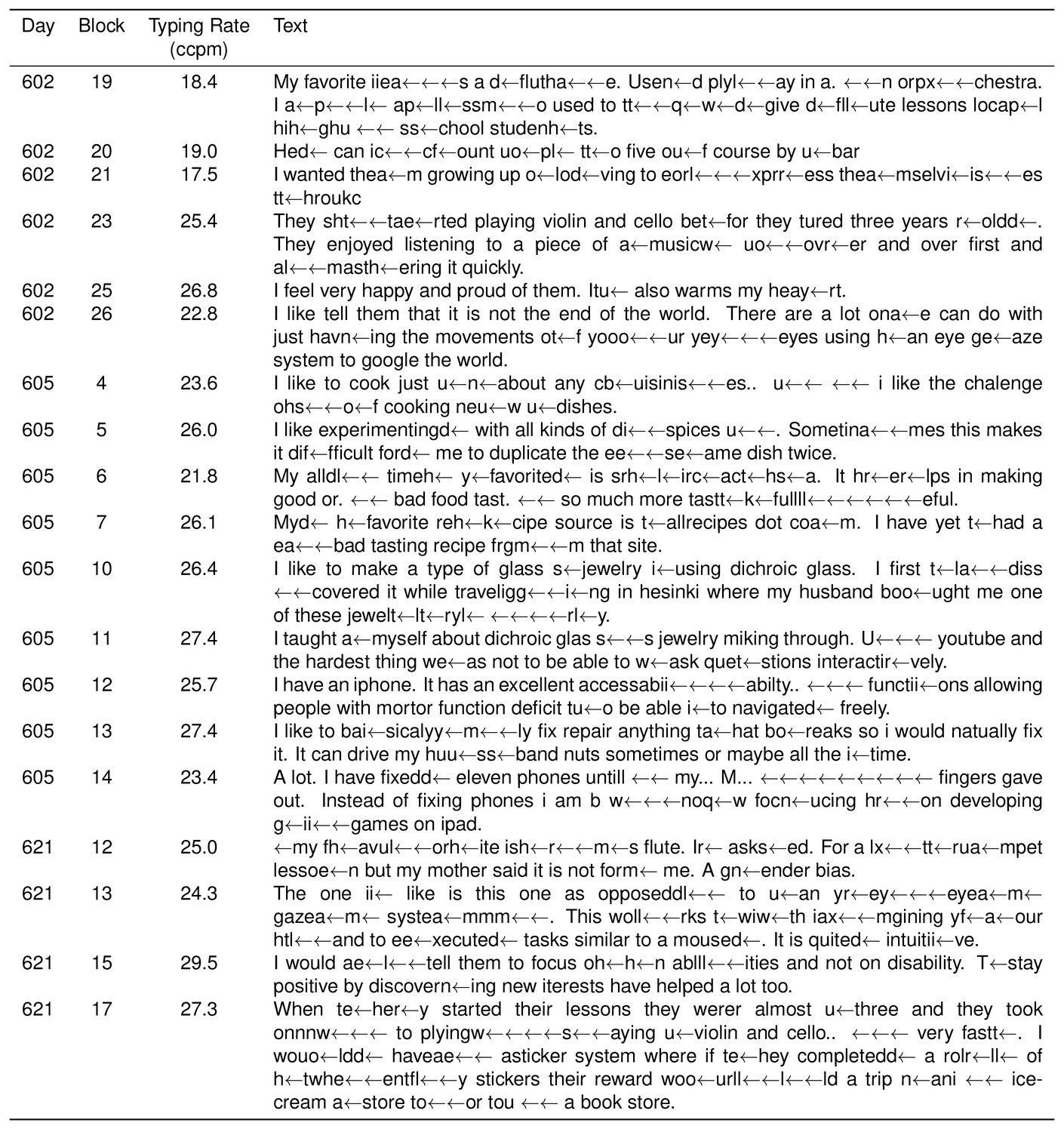
Participant T6’s character selection during the question and answer sessions.
Same as previous table, but also includes all errors and backspace characters entered.
Figure 1—figure supplement 3

Filter calibration, assessment, and typing blocks for the ‘free typing’ sessions performed with participant T6.
This expanded figure shows the free typing data presented in Figure 1, as well as the filter calibration and assessment stages that preceded the collection of those data. These sessions were not optimized for filter calibration, rather, performance was achieved and maintained by running evaluation or recalibration blocks at the participant or researchers’ discretion. The black bands along the gray bar just above the x-axis denote filter calibration time. Red bars denote evaluation blocks or blocks where T6 stopped the block early. Blue bars denote uninterrupted blocks of free typing.
Figure 2 with 3 supplements
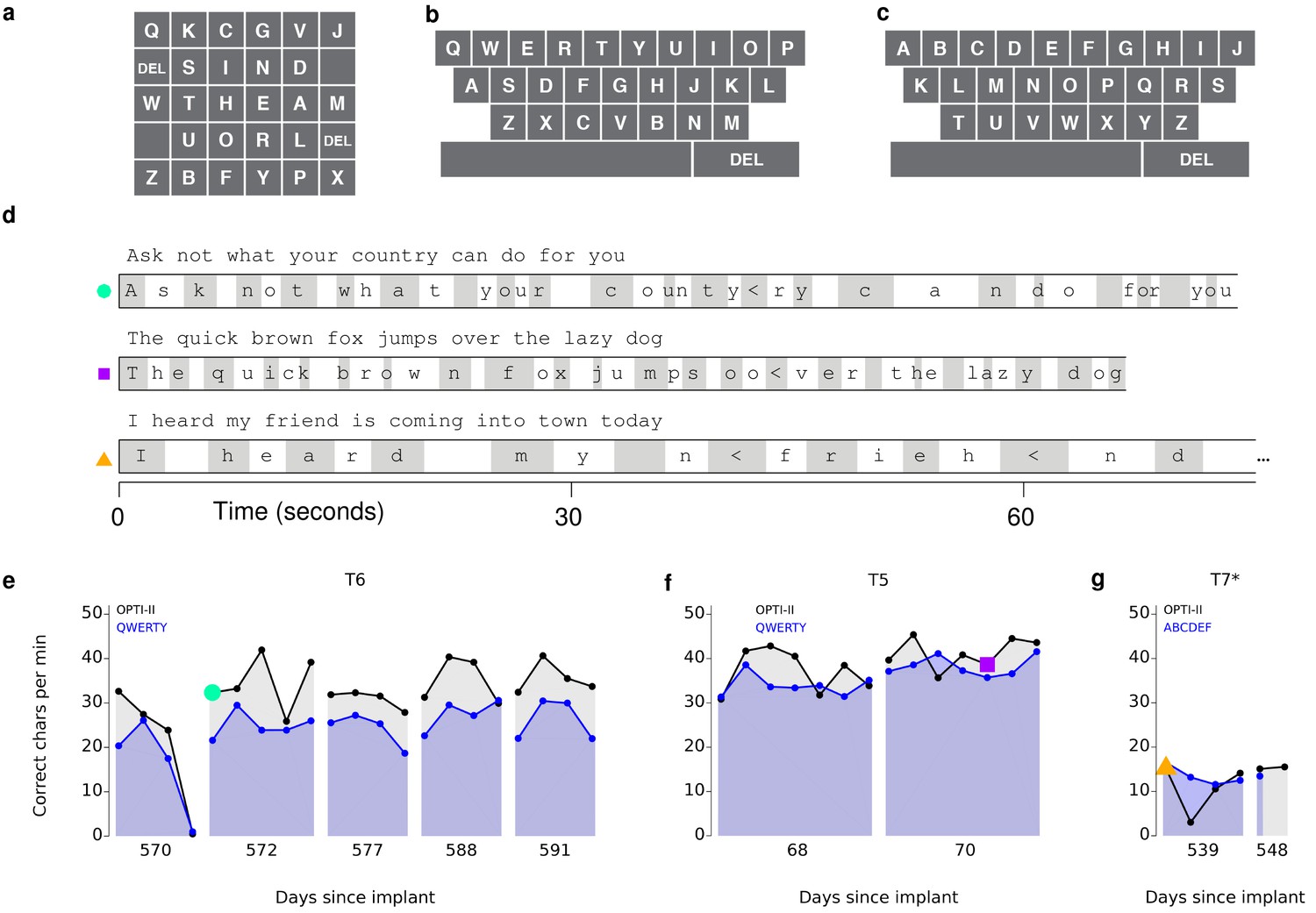
Performance in copy typing tasks.
(a) Layout for the OPTI-II keyboard (b) Layout for the QWERTY keyboard. (c) Layout for the ABDEF keyboard. (d) Examples of text typed during three copy typing evaluations with participants T6, T5, and T7. Each example shows the prompted text, followed by the characters typed within the first minute of the two-minute evaluation block. Box width surrounding each character denotes the time it took to select the character. ‘<’ character denotes selection of a backspace key. Colored symbols on the left correspond to blocks denoted in lower plots. (e) Performance in the copy typing task with the QWERTY (blue) and OPTI-II (black) keyboards across 5 days for participant T6. QWERTY performance was 23.9 ± 6.5 correct characters per minute (ccpm; mean ± s.d.), while OPTI-II performance was 31.6 ± 8.7 ccpm. X-axis denotes number of days since array was implanted. (f) Performance in the copy typing task with the QWERTY (blue) and OPTI-II (black) keyboards across 2 days for participant T5. Average performance was 36.1 ± 0.9 and 39.2 ± 1.2 ccpm for the QWERTY and OPTI-II keyboards, respectively. (g) Performance in the copy typing task with the ABCDEF (blue) and OPTI-II (black) keyboards across two days for participant T7. Average performance was 13.5 ± 1.9 and 12.3 ± 4.9 ccpm for the ABCDEF and OPTI-II keyboards, respectively. *Participant T7 did not use an HMM for selection.
Figure 2—figure supplement 1
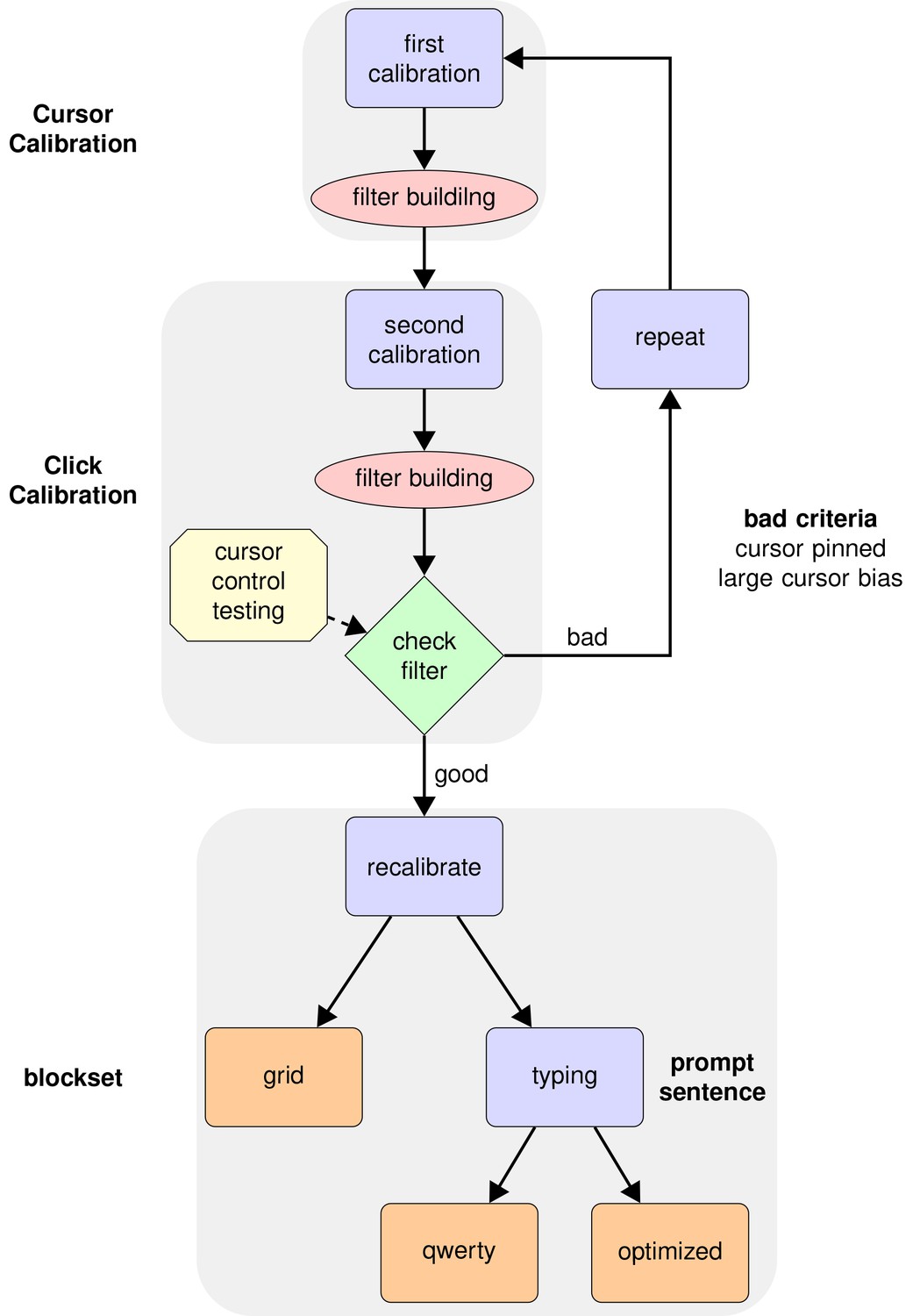
Data collection protocol for quantitative performance evaluation sessions.
Each research session followed a strict calibration and data collection protocol. This flow diagram is the research protocol for T6. T5 and T7’s protocols were very similar. T6 started with a glove-controlled movement calibration block (112 trials, 100 pixel target diameter, 750 ms hold time). T5 and T7 did not use data s, and instead that calibration block was substituted for a block where the cursor moved automatically while they attempted to move along with the cursor (‘open-loop’ calibration). This was followed by HMM click decoder calibration for T6. This was omitted for T7 as no HMM was used for sessions with him, but the cursor decoder was recalibrated at this stage. T5 did not need this either, as the HMM was trained on the same block as the cursor movement decoder. If the output of these two calibration steps resulted in a controllable cursor, then the data blocksets were started. Here, the decoders were recalibrated again based on a closed-loop control block, and data was collected under a strict timing protocol (see Figure 2—figure supplement 2). Blocksets were repeated as possible, at the discretion of the participant. Once a blockset was started for a particular research session, starting over with initial calibration was prohibited.
Figure 2—figure supplement 2

Example of the blockset structure for quantitative performance evaluation sessions.
Each blockset began with a 3 min calibration or bias calculation block (purple). Breaks (green) were interspersed throughout the data collection. Each blockset consisted of three evaluation blocks (orange), two minutes each, that tested either copy typing or grid performance. Copy typing performance was evaluated with two keyboards (T6 and T5: QWERTY and OPTI-II, T7: ABCD and OPTI-II). Evaluation blocks were presented in a pseudo-randomized order (detailed in Materials and methods: Quantitative performance evaluations). In this example, T6 was first evaluated on a grid block, followed by a QWERTY cued typing block, followed by an OPTI-II cued typing block.
Figure 2—figure supplement 3

Sentences used to evaluate performance in copy typing tasks.
Seven sentences were chosen for the copy typing task (presented in Figure 2). Sentence one is an English language pangram, i.e., it contains all the letters of the English alphabet, and is traditionally used to evaluate typing performance (e.g. Silfverberg et al., 2000). Sentences 2–4 are common English phrases that were easy for the participants to remember. Sentence five is the beginning of the ‘Rainbow Passage,’ commonly used in the speech pathology field to evaluate speech quality/deficits ([Fairbanks, 1960], pp. 124–139). Sentences 6 and 7 are conversational and were chosen to simulate the types of phrases an assistive communication device might be used to type in a conversation.
Figure 3 with 2 supplements
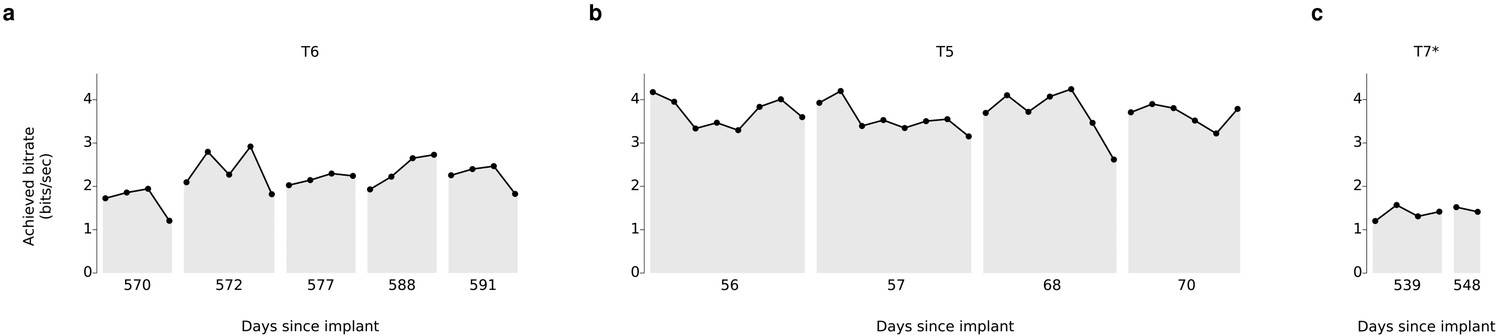
Information throughput in the grid task.
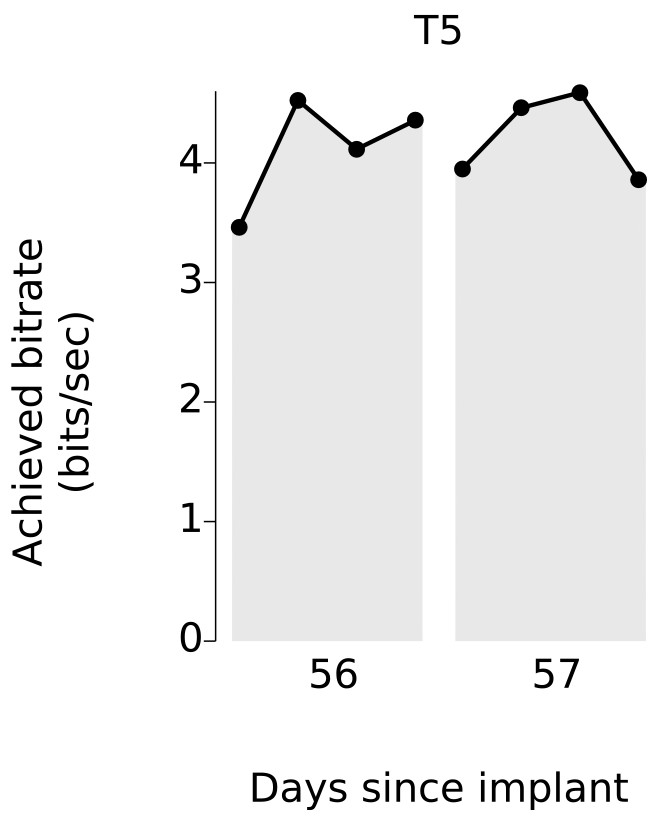
(a) Performance in the grid task across 5 days for participant T6. T6 averaged 2.2 ± 0.4 bits per second (mean ± s.d.). (b) Performance in the grid task across 2 days for participant T5. T5 averaged 3.7 ± 0.4 bits per second. (c) Performance in the grid task across 2 days for participant T7. T7 averaged 1.4 ± 0.1 bits per second. X-axis denotes number of days since array was implanted. *Participant T7 did not use an HMM for selection.
Figure 3—figure supplement 1
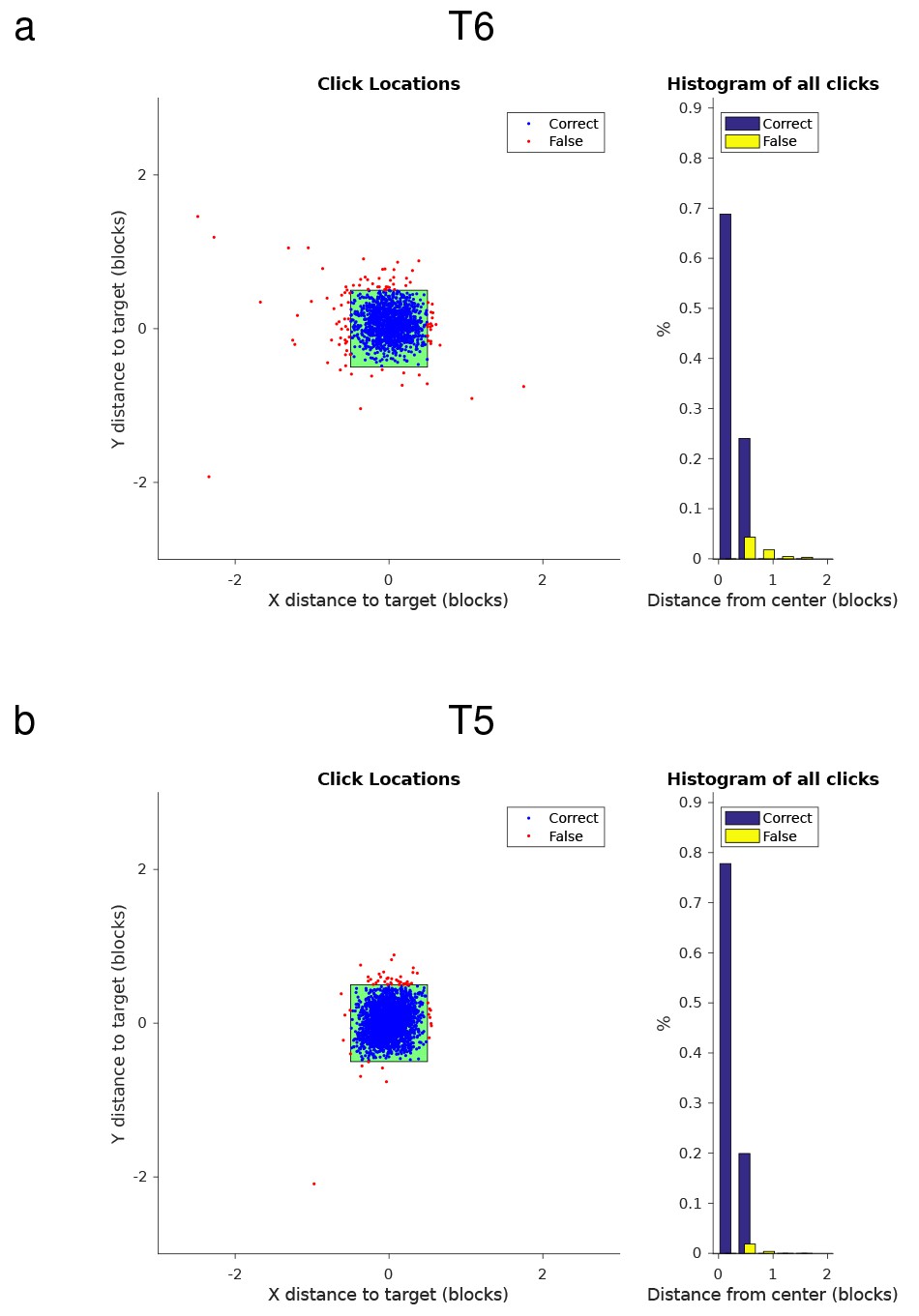
Performance of the HMM-based classifier during grid tasks with participants T6 and T5.
This figure replicates the analysis from Kim et al., 2011 (Kim et al., 2011) (Figure 5), which demonstrated the previous best discrete selection algorithm for a communication BCI. (a) Performance of the HMM for participant T6. The panel on the left shows all the clicks that occurred in the grid task across 5 days of quantitative performance evaluations. Each dot plots the position of a click relative to the center of the cued target (blue - correct click, red - false click), and the green square shows the size of a single grid target. The right panel shows a histogram of the distance between click location and the center of the target for all clicks. T6 clicked on the correct target 92.6% of the time (1007/1087 total clicks). (b) Performance of the HMM for participant T7 in the grid task over 4 days of quantitative performance evaluations. T5 clicked on the correct target 97.7% of the time (2325/2379 total clicks). As shown, for both participants, when incorrect clicks did occur, they primarily occurred close to the edge of the desired target.
Figure 3—figure supplement 2
Information throughput for participant T5 when using a dense grid.
Performance in the grid task for participant T5 when measured with a denser grid (9 × 9, as opposed to the 6 × 6 grid used for all participants for the data shown in Figure 3). An example of T5’s performance in the 9 × 9 grid is shown in Video 10.
Figure 4 with 1 supplement
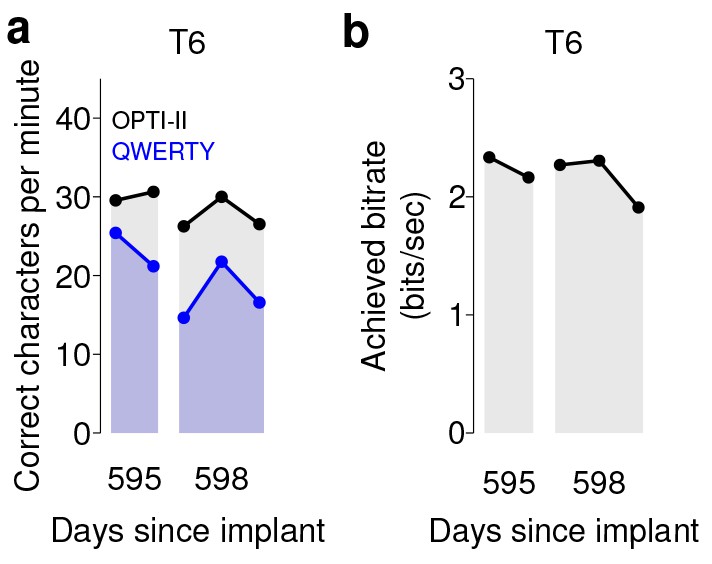
Performance of the BCI with movements suppressed.
A potential concern is that the demonstrated performance improvement for participant T6 relative to previous studies is due to her retained movement ability. Participant T6 was capable of dexterous finger movements (as opposed to participants T5 and T7, who retained no functional movements of their limbs). To control for the possibility that physical movements underlie the demonstrated improvement in neural control, we measured T6’s BCI performance during the same quantitative performance evaluation tasks, but asked her to suppress her movements as best as she could. In these sessions, decoders were calibrated based on imagined (rather than attempted) finger movements. (a) During copy typing evaluations with movements suppressed, T6’s average performance using the OPTI-II keyboard was 28.6 ± 2.0 ccpm (mean ± s.d.), and her average performance using the QWERTY keyboard was 19.9 ± 4.3 ccpm (as discussed in the main text, her performance while moving freely was 31.6 ± 8.7 ccpm and 23.9 ± 6.5 ccpm for the OPTI-II and QWERTY keyboards, respectively). (b) During grid evaluations with movements suppressed, T6’s achieved bitrate was 2.2 ± 0.17 bps (compared to 2.2 ± 0.4 bps while moving freely). We note that using the BCI while suppressing movements is a more difficult and cognitively demanding task - since the participant’s natural, intuitive attempts to move actually generate physical movements, she needed instead to imagine movements, and restrict her motor cortical activity to patterns that do not generate movement. (This is supported by the participants own comment regarding the difficulty in controlling the BCI while imagining movement without actually moving: ‘It is a learning curve for me to not move while imagining.’) Despite this additional cognitive demand, performance with movements suppressed was quite similar to performance when the participant moved freely (within 0–20%) - in all three cases, the differences in performance were not significant (p>0.2 in all cases, Student’s t test). Data are from T6’s trial days 595 and 598.
Figure 4—figure supplement 1

Participant T6’s movements are greatly reduced when movements are actively suppressed.
In the previous analysis (Figure 4), we demonstrated that T6’s performance was largely unchanged even when she actively suppressed her movements. Here we quantified the degree to which movements were suppressed during those sessions. We first analyzed the participant’s movements during decoder calibration (panels a and b) and then closed-loop BCI control (panel c). For decoder calibration, we compared freely moving sessions and sessions in which movements were suppressed (see Materials and methods: Quantifying movement suppression). Decoders were calibrated using a center-out-and-back task, with the cursor’s position tied to the measured finger position (freely moving sessions) or with the cursor’s position following pre-programmed movements (i.e., ‘open-loop’ calibration) and finger movements were imagined (movement suppressed sessions). For each condition (i.e., freely moving vs. suppressed movement), we measured finger position as a function of time (relative to the starting position for each trial), and averaged these positions across all trials for a given target direction (the position of each pair of traces denotes the target’s position relative to the center target). (a) During movement-based decoder calibration (freely moving sessions), thumb movements (red) controlled the vertical axis, while index finger movements (blue) controlled the horizontal axis. Horizontal scale bars represent 200 ms, and the vertical scale bar represents 100 units on the glove sensor scale (arbitrary units). (b) During open-loop decoder calibration (movement suppressed sessions), in which T6 was asked to simply imagine finger movements but avoid moving to the best of her abilities, finger movements were largely suppressed but minute movement was still detectable. Scale bars match the previous panel. Overall, during decoder calibration, movements were greatly reduced (p<0.01, paired Student’s t test), and the median suppression ratio was a factor of 7.2 (index finger) and 12.6 (thumb). (c) We also quantified the amount of movement during closed-loop BCI control (grid task) in sessions in which movements were suppressed. Because individual trials were highly variable (targets appeared in random locations during the grid task), we grouped trials by the target direction (i.e., the angle between the previous target and the prompted target for the current trial). The position of each pair of traces in the circle denotes the target direction. To ensure that any minute movements were captured in the analysis, the absolute value (rather than the signed value) of the finger position was taken prior to averaging across trials. Scale bars match the previous panel. As shown, movement during closed-loop BCI control was comparable to or less than movement during decoder calibration (panel b), which itself was a factor of 7.2–12.6 times less than movement during movement-based decoder calibration (panel a).
Figure 5 with 2 supplements
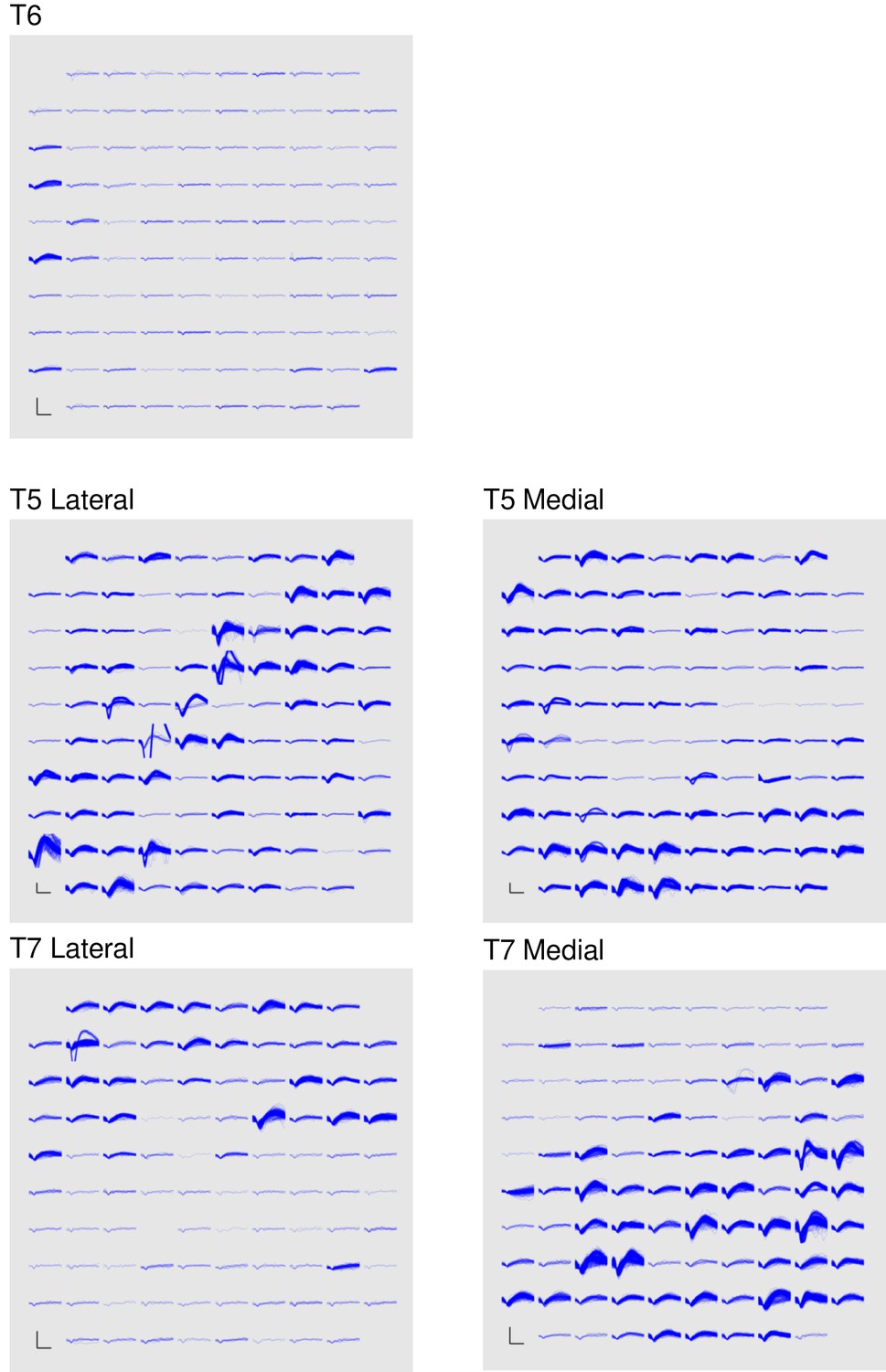
Signal quality on the participants’ electrode arrays.
Each panel shows the recorded threshold crossing waveforms for all 96 channels of a given array for a 60 s period during the participant’s first quantitative performance evaluation block. T6 had a single implanted array, while T5 and T7 had two implanted arrays. Scale bars (lower left corner of each panel) represent 150 µV (vertical) and 0.5 milliseconds (horizontal). Voltages were analog band-pass filtered between 0.3 Hz and 7.5 kHz, then sampled by the NeuroPort system at 30 kHz. The resulting signals were then digitally high-pass filtered (500 Hz cutoff frequency) and re-referenced using common average referencing. Thresholds were set at −4.5 times the root-mean-squared (r.m.s.) voltage value for each channel. Channels without a corresponding trace did not have any threshold crossing events during this time period. Data are from sessions 570, 56, and 539 days post-implant for T6, T5, and T7, respectively.
Figure 5—figure supplement 1
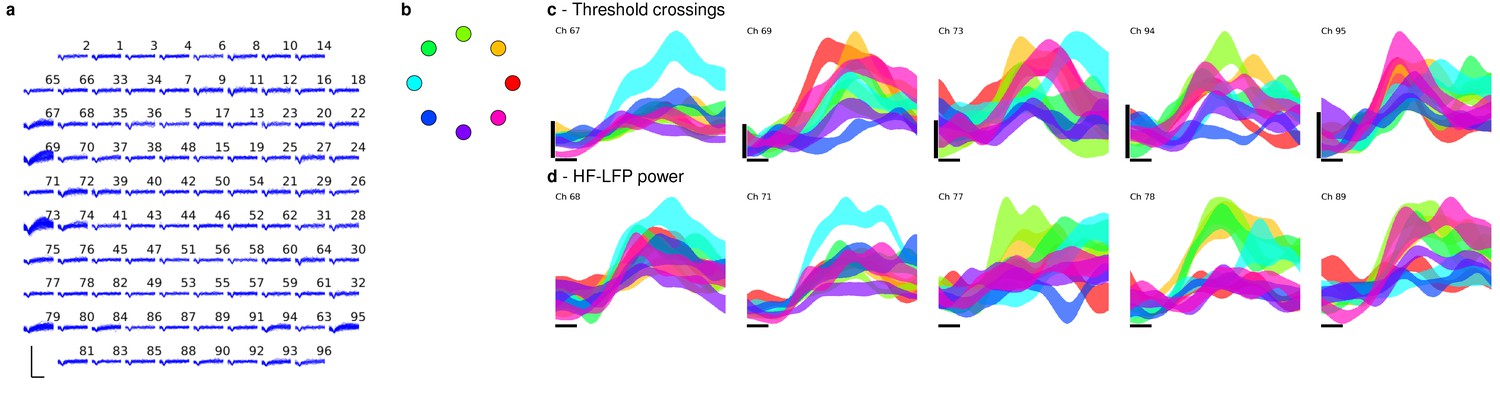
HF-LFP signals have similar time course and condition dependence to spiking activity.
Control algorithms for T6 incorporated high-frequency LFP power signals (HF-LFP; see Materials and methods). A potential concern with a power signal is that it may pick up artifacts related to EMG from eye movements. Here we analyze activity during a decoder calibration block to show that HF-LFP signals have a strikingly similar time course and condition dependence as spiking activity. (a) Sample of the signals recorded on T6’s array during a decoder calibration block. Some channels show discernible single or multiunit activity (threshold crossings), while others do not. Neural data was processed as in Figure 5, with thresholds set to −4 times the r.m.s. voltage value for each channel. Scale bars (lower left corner) represent 150 µV (vertical) and 0.5 milliseconds (horizontal). (b) Target positions and corresponding colors used to label each condition in the subsequent panels. (c) Threshold crossing rates as a function of time for each condition (movement to a given target location), beginning at the time of target onset, for five example channels with discernable threshold crossing activity. Each trace represents the mean ± s.e.m. threshold crossing rate for a given condition, computed across seven trials for each condition. Horizontal scale bar represents 100 ms, vertical scale bar represents 40 threshold crossings / sec. Traces from individual trials were smoothed by convolving with a Gaussian kernel with 50 ms s.d. prior to mean / standard deviation calculations. (d) Same plots, but depicting HF-LFP power instead of threshold crossing rates, for a different set of example channels that did not have discernible multiunit activity. Horizontal scale bar is again 100 ms, vertical scale (HF-LFP power) is in arbitrary units. The same trials as panel (c) above were used. As shown, HF-LFP power signals display a similar time course following target onset, as well as degree of condition dependence, as threshold crossing activity. Data are from T6’s post-implant day 570.
Figure 5—figure supplement 2
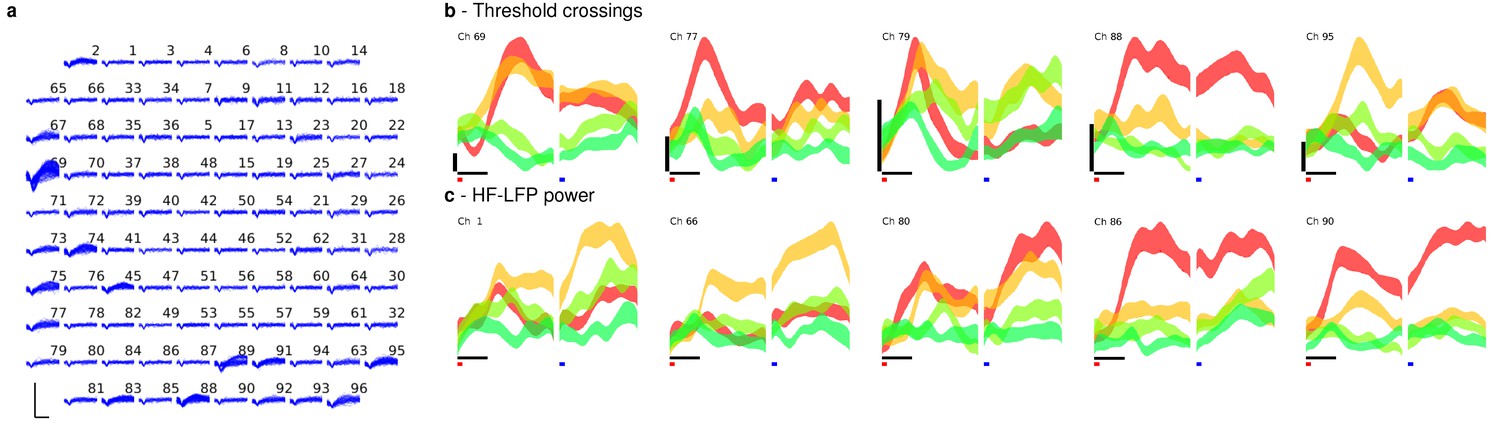
HF-LFP signals show a similar time course and condition dependence to spiking activity during auditory-cued tasks in which the participant had her eyes closed.
Following Figure 5—figure supplement 1, to further rule out the possibility that HF-LFP signals are related to eye movements, we include data recorded as T6 performed an auditory-cued task with her eyes closed as she attempted multiple single-joint movements. The task included a delay period in which she was prompted (via an auditory cue) about the upcoming movement attempt, but was asked to not attempt the movement until receiving a go cue. (a) Sample of the signals recorded on T6’s array during the attempted movement. Some channels show discernible single or multiunit activity (threshold crossings), while others do not. Neural data was processed as in Figure 5, with thresholds set to −4 times the r.m.s. voltage value for each channel. Scale bars (lower left corner) represent 150 µV (vertical) and 0.5 milliseconds (horizontal). (b) Threshold crossing rates as a function of time for attempted single-joint flexion movements (index finger: red, thumb: yellow, wrist: light green, elbow: darker green) for five example channels with discernable threshold crossing activity. Each trace represents the mean ± s.e.m. threshold crossing rate for a given condition, computed across 20 trials for each condition. Horizontal scale bar represents 500 ms, vertical scale bar represents 20 threshold crossings / sec. Red box denotes the time each movement was prompted, and blue box denotes the time of the go cue (break in the traces is due to the randomized delay period across trials). As shown, activity is indicative of both planning and movement attempt epochs. Traces from individual trials were smoothed by convolving with a Gaussian kernel with 50 ms s.d. prior to mean / standard deviation calculations. (d) Same plots, but depicting HF-LFP power instead of threshold crossing rates, for a different set of example channels that did not have discernible multiunit activity. Horizontal scale bar is again 500 ms, vertical scale (HF-LFP power) is in arbitrary units. The same trials as panel (c) above were used. Because there were no visual cues and the participant had her eyes closed, it is unlikely that the participant was making condition dependent eye movements. However, as shown, even in the absence of visual cues, HF-LFP power signals display a similar time course following target onset, degree of planning- and movement-related activity, and degree of condition dependence, as threshold crossing activity. Data are from T6’s post-implant day 488.
Videos
Video 1
Example of participant T6’s free-paced, free choice typing using the OPTI-II keyboard.
T6 was prompted with questions and asked to formulate an answer de novo. Once presented with a question, she was able to think about her answer, move the cursor and click on the play button to enable the keyboard (bottom right corner), and then type her response. In this example, the participant typed 255 characters in ~9 min, at just over 27 correct characters per minute. One of two audible ‘beeps’ followed a target selection, corresponding to the two possible selection methods: T6 could select targets using either the Hidden Markov Model-based ‘click’ selection (high-pitched noises) or by ‘dwelling’ in the target region for 1 s (low-pitched noises). The plot at the bottom of the video tracks the typing performance (correct characters per minute) with respect to time in the block. Performance was smoothed using a 30 s symmetric Hamming window. The scrolling yellow bar indicates the current time of that frame. During the free typing task, T6 was asked to suppress her hand movements as best as possible. (During the quantitative performance evaluations, T6 was free to make movements as she wished.) This video is from participant T6, Day 621, Block 17. Additional ‘free typing’ examples for T6 are detailed in Figure 1—figure supplements 1 and 2.
Video 2
Example of participant T6’s ‘copy typing’ using the OPTI-II keyboard.
In the copy typing task, participants were presented with a phrase and asked to type as many characters as possible within a two-minute block. T6 preferred that the cursor remain under her control throughout the task – i.e., no re-centering of the cursor occurred after a selection. This video is from participant T6, Day 588, Blockset 2. Performance in this block was 40.4 ccpm.
Video 3
Example of participant T6’s ‘copy typing’ using the QWERTY keyboard.
Same as Video 2, but using the QWERTY keyboard layout. This video is from participant T6, Day 588, Blockset 4. Performance in this block was 30.6 ccpm.
Video 4
Example of participant T5’s ‘copy typing’ using the OPTI-II keyboard.
Same as Video 2, but for participant T5. This video is from participant T5, Day 68, Blockset 4. Performance in this block was 40.5 ccpm.
Video 5
Example of participant T5’s ‘copy typing’ using the QWERTY keyboard.
Same as Video 4, but using the QWERTY keyboard layout. This video is from participant T5, Day 68, Blockset 2. Performance in this block was 38.6 ccpm.
Video 6
Example of participant T7’s ‘copy typing’ using the OPTI-II keyboard.
Same as Video 2, but for participant T7. T7 selected letters by dwelling on targets only. In addition, T7 preferred that the cursor re-center after every selection (i.e., following a correct or an incorrect selection). These across-participant differences are detailed in Materials and methods: Quantitative performance evaluations (under ‘Target selection and cursor re-centering’). This video is from participant T7, Day 539, Blockset 3. Performance in this block was 10.6 ccpm.
Video 7
Example of participant T7’s ‘copy typing’ using the ABCDEF keyboard.
Same as Video 6, but using the ABCDEF keyboard layout. This video is from participant T7, Day 539, Blockset 1. Performance in this block was 16.5 ccpm.
Video 8
Example of participant T6’s performance in the grid task.
This video is from participant T6, Day 588, Blockset 3. Performance in this block was 2.65 bps.
Video 9
Example of participant T5’s performance in the grid task.
This video is from participant T5, Day 56, Blockset 4 (Block 28). Performance in this block was 4.01 bps.
Video 10
Example of participant T5’s performance in the dense grid task (9 × 9).
This video is from participant T5, Day 56, Blockset 4 (Block 30). Performance in this block was 4.36 bps.
Video 11
Example of participant T7’s performance in the grid task.
This video is from participant T7, Day 539, Blockset 2. Performance in this block was 1.57 bps.
Tables
Table 1
Survey of BCI studies that measure typing rates (correct characters per minute; ccpm), bitrates, or information transfer rates for people with motor impairment. Number ranges represent performance measurements across all participants for a given study. Communication rates could be further increased by external algorithms such as word prediction or completion. As there are many such algorithms, the current work excluded word prediction or completion to focus on measuring the performance of the underlying system. The most appropriate points of comparison, when available, are bitrates, which are independent of word prediction or completion algorithms. Similarly, information transfer rates are also a meaningful point of comparison, though they are less reflective of practical communication rates than bitrate (which takes into account the need to correct errors; detailed in Nuyujukian et al. (2015); Townsend et al. (2010)). For the current work, and for Jarosiewicz et al. 2015, we also break down performance by individual participant to facilitate direct comparisons (denoted by italics). As shown, performance in the current study outperforms all previous BCIs tested with people with motor impairment. *These numbers represent performance when measured using a denser grid (9 × 9; Figure 3—figure supplement 2 and Video 10). **For this study, reported typing rates included word prediction / completion algorithms. ***Number range represents the range of performance reported for the single study participant. ****Other reported numbers included word prediction / completion algorithms. †Acronyms used: ReFIT-KF: Recalibrated Feedback Intention-trained Kalman Filter. HMM: Hidden Markov Model. CLC: Closed-loop Calibration. LDA: Linear Discriminant Analysis. RTI: Retrospective Target Inference. DS: Dynamic Stopping.
| Study | Participant(s) | Recording modality | Control modality | Etiology of motor impairment | Average typing rate (ccpm) | Average bitrate (bps) | Average ITR (bps) |
|---|---|---|---|---|---|---|---|
| This study | average (N = 3) | intracortical | ReFIT-KF+HMM† | ALS (2), SCI (1) | 28.1 | 2.4 | 2.4 |
| ‘‘ | T6 | ALS | 31.6 | 2.2 | 2.2 | ||
| ‘‘ | T5 | SCI | 39.2 | 3.7 | 3.7 | ||
| ‘‘ | ‘‘ | ‘‘ | - | 4.2* | 4.2* | ||
| ‘‘ | T7 | (No HMM) | ALS | 13.5 | 1.4 | 1.4 | |
| Bacher et al., 2015 | S3 | intracortical | CLC+LDA† | brainstem stroke | 9.4 | - | - |
| Jarosiewicz et al., 2015 | average (N = 4) | intracortical | RTI+LDA† | ALS (2), brainstem stroke (2) | n/a** | 0.59 | - |
| ‘‘ | T6 | ALS | ‘‘ | 0.93 | - | ||
| ‘‘ | T7 | ALS | ‘‘ | 0.64 | - | ||
| ‘‘ | S3 | brainstem stroke | ‘‘ | 0.58 | - | ||
| ‘‘ | T2 | brainstem stroke | ‘‘ | 0.19 | - | ||
| Nijboer et al., 2008 | N = 4 | EEG | P300 | ALS | 1.5–4.1 | - | 0.08–0.32 |
| Townsend et al., 2010 | N = 3 | EEG | P300 | ALS | - | 0.05–0.22 | - |
| Münßinger et al., 2010 | N = 3 | EEG | P300 | ALS | - | - | 0.02–0.12 |
| Mugler, et al. 2010 | N = 3 | EEG | P300 | ALS | - | - | 0.07–0.08 |
| Pires et al., 2011 | N = 4 | EEG | P300 | ALS (2), cerebral palsy (2) | - | - | 0.24–0.32 |
| Pires et al., 2012 | N = 14 | EEG | P300 | ALS (7), cerebral palsy (5), Duchenne muscular dystrophy (1), spinal cord injury (1) | - | - | 0.05–0.43 |
| Sellers et al., 2014 | N = 1 | EEG | P300 | brainstem stroke | 0.31–0.93*** | - | - |
| McCane et al., 2015 | N = 14 | EEG | P300 | ALS | - | - | 0.19 |
| Mainsah et al., 2015 | N = 10 | EEG | P300-DS | ALS | - | - | 0.01–0.60 |
| Vansteensel et al., 2016 | N = 1 | subdural ECoG | Linear Classifier | ALS | 1.15**** | - | 0.21 |
Table 2
Participants’ prior BCI experience and training for studies considered in Table 1. The experience column details the number of participants in the respective study that had prior experience with BCIs at the time of the study and, if reported, the duration of that prior experience and/or training.
| Study | Participant(s) | BCI experience/training |
|---|---|---|
| This study | average (N = 3) | 1 year |
| ‘‘ | T6 | 1.5 years |
| ‘‘ | T5 | 9 prior sessions (1 month) |
| ‘‘ | T7 | 1.5 years |
| Bacher et al., 2015 | S3 | 4.3 years |
| Jarosiewicz et al., 2015 | average (N=4) | 2 years |
| ‘‘ | T6 | 10 months to 2.3 years |
| ‘‘ | T7 | 5.5 months to 1.2 years |
| ‘‘ | S3 | 5.2 years |
| ‘‘ | T2 | 4.6 months |
| Nijboer et al., 2008 | N = 4 | At least 4–10 months |
| Townsend et al., 2010 | N = 3 | All had prior P300 BCIs at home, two had at least 2.5 years with BCIs |
| Münßinger et al., 2010 | N = 3 | Two of three had prior experience, training not reported |
| Mugler, et al. 2010 | N = 3 | Average experience of 3.33 years |
| Pires et al., 2011 | N = 4 | No prior experience, training not reported |
| Pires et al., 2012 | N = 14 | Not reported |
| Sellers et al., 2014 | N = 1 | Prior experience not reported, thirteen months of continuous evaluation |
| McCane et al., 2015 | N = 14 | Not reported |
| Mainsah et al., 2015 | N = 10 | Prior experience not reported, two weeks to two months of evaluation |
| Vansteensel et al., 2016 | N = 1 | 7 to 9 months |
Table 3
Summary of the decoding and calibration approaches used with each participant.
T6 | T7 | T5 | |
|---|---|---|---|
Continuous decoding algorithm | ReFIT Kalman Filter (threshold crossings and HF-LFP) | ReFIT Kalman Filter (threshold crossings) | ReFIT Kalman Filter (threshold crossings) |
Discrete decoding algorithm | Hidden Markov Model (HF-LFP) | n/a | Hidden Markov Model (threshold crossings) |
Dwell time | 1 s (reset on target exit) | 1.5 s (cumulative) | 1 s (reset on target exit) |
Bias estimation | no | yes | yes |
Cursor recentering | no | yes | no |
Recalibration blocks | Recalibrated continuous and discrete decoders | Only updated bias estimates | Only updated bias estimates |
Error attenuation in recalibration block | yes | yes | no |
Download links
A two-part list of links to download the article, or parts of the article, in various formats.
Downloads (link to download the article as PDF)
Open citations (links to open the citations from this article in various online reference manager services)
Cite this article (links to download the citations from this article in formats compatible with various reference manager tools)
High performance communication by people with paralysis using an intracortical brain-computer interface
eLife 6:e18554.
https://doi.org/10.7554/eLife.18554




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}