Chronology of motor-mediated microtubule streaming
- Forschungszentrum Jülich, Germany
Figures
Figure 1
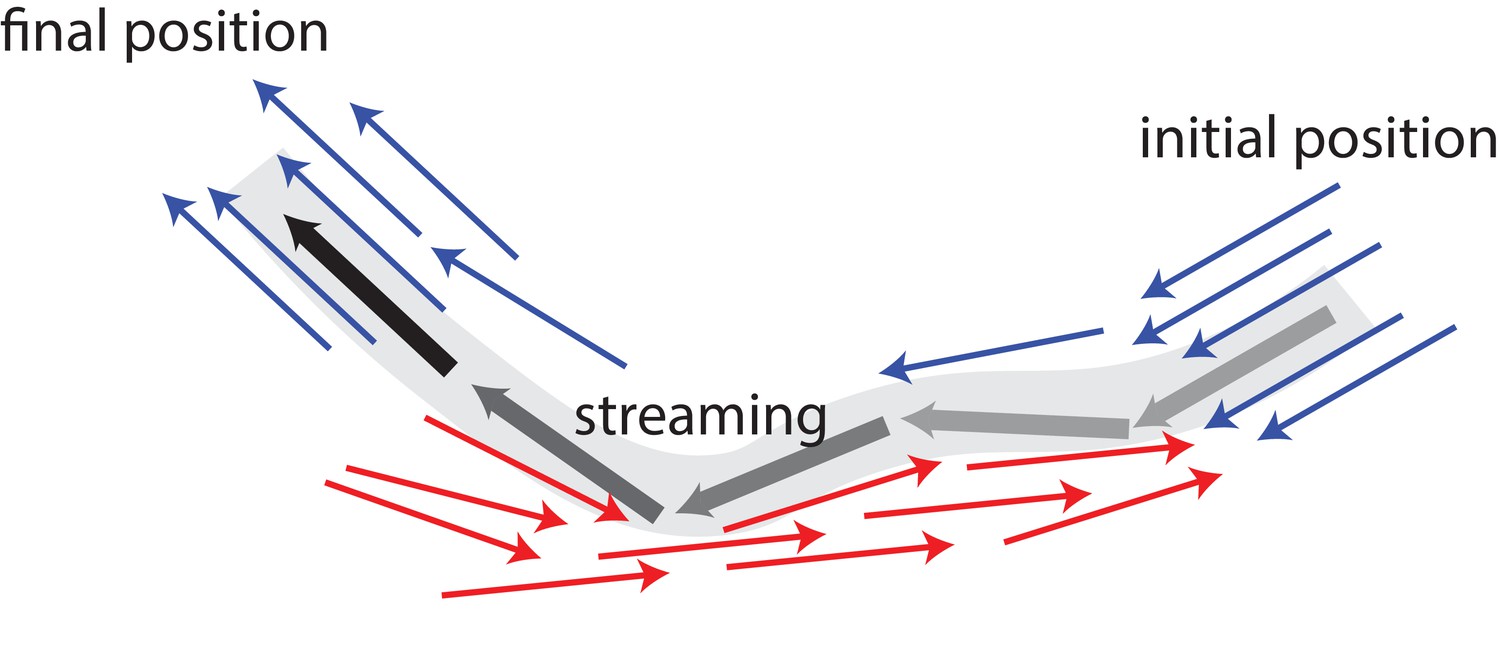
Schematic illustrating MT bundling and streaming.
Polar-aligned MTs are coloured blue, and antialigned MTs are coloured red. The grey/black MT is transported from its initial position (grey), in one polar-aligned bundle, to its final position (black), to another polar-aligned bundle, via a stream.
Figure 2
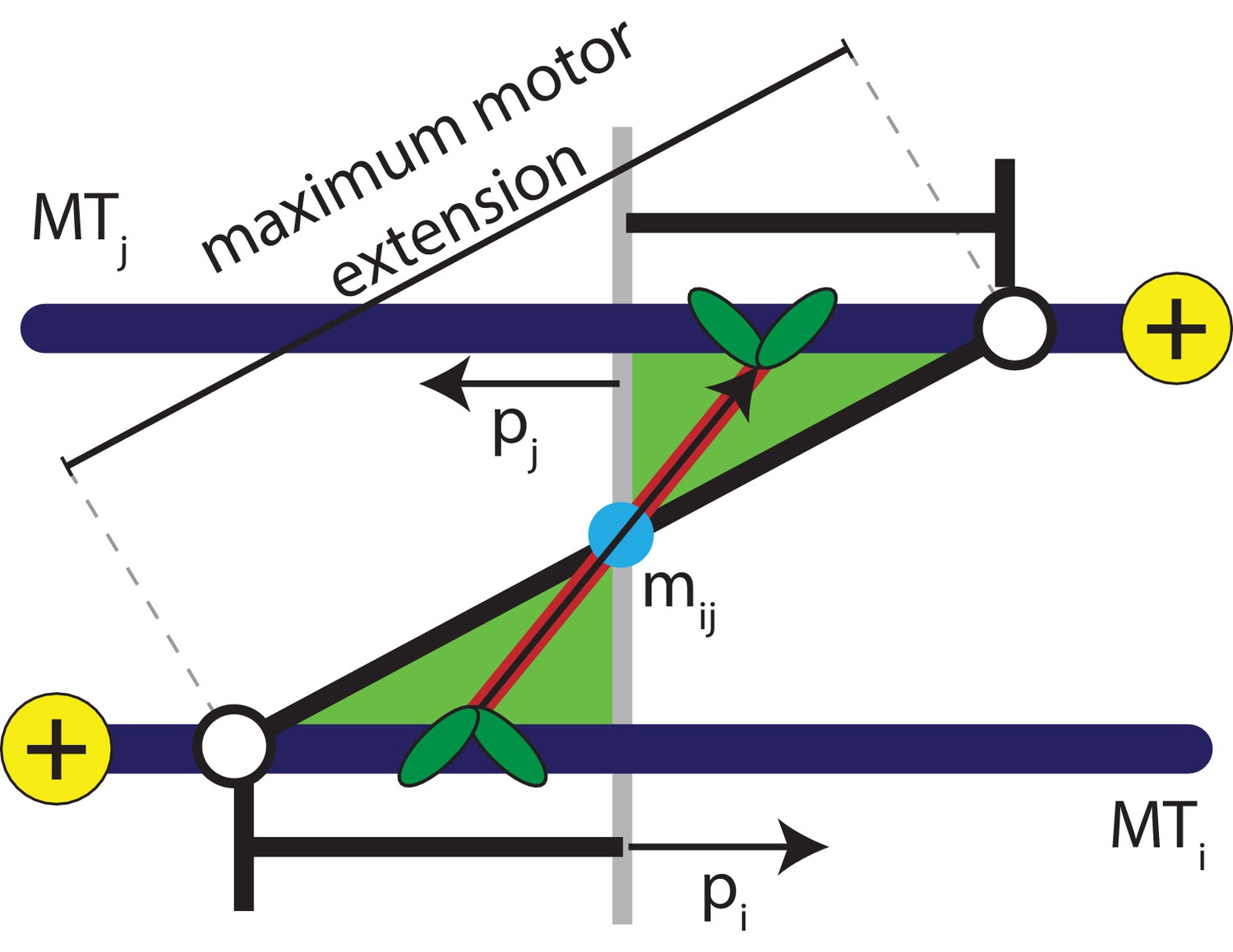
Schematic explaining the conditions that satisfy the antialigned motor potential.
The vectors, , , and , represent the unit orientation vectors of MT , MT , and the motor vector that crosslinks the beads of adjacent MTs, respectively. The white circles represent the maximum extension of motors between the two MTs.
Figure 3 with 10 supplements
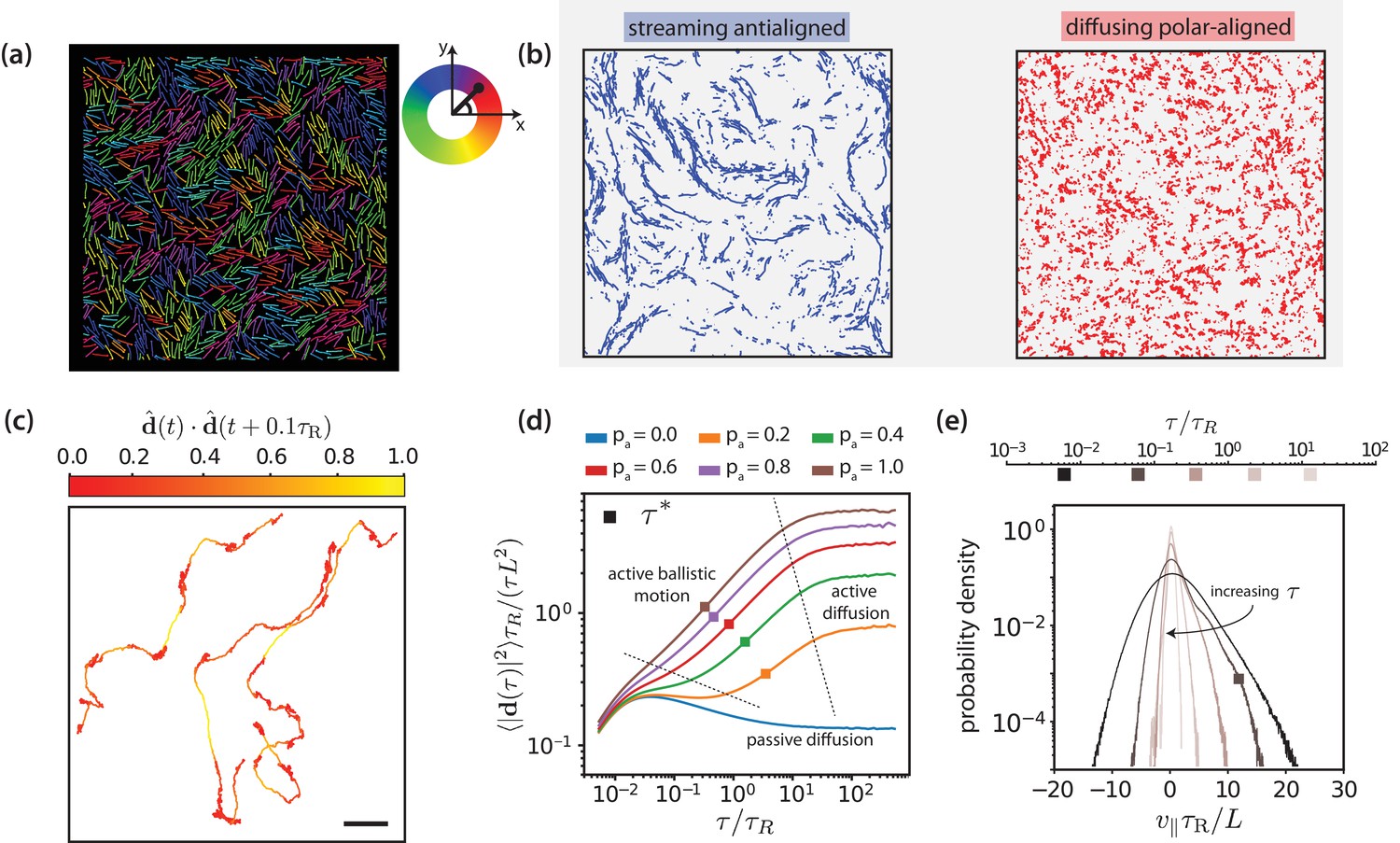
Motor-driven and diffusive motion of MTs.
(a) Simulation snapshot of MTs organised by effective motors. MTs are coloured based on their orientation according to the colour legend on the right. See corresponding Video 1. (b) Trajectories of MTs within a time window of 1.2 separated based on the antialigned and polar-aligned categories. See corresponding Video 2. (c) Plots of the trajectory of three selected MTs coloured based on the correlation of adjacent steps in their velocity. The entire trajectory is for a time window of is the unit vector of MT displacement. The fast-streaming and slow-diffusion modes correspond with the yellow and red parts of the trajectories respectively. The scale bar corresponds to the length of five MTs. See corresponding Video 3. (d) MSD/lag time for various levels of activity and MT density . The time scale of maximal activity, , calculated from the time of maximal skew is indicated by the squares on the curves. (e) Histogram of parallel velocity for various . The curve closest corresponding to the time scale of maximal activity, , is indicated with a box marker. All figures are for . (a), (b), (c) and (e) are for .
-
Figure 3—source data 1
Source data for graphs shown in Figure 3 (d,e).
- https://doi.org/10.7554/eLife.39694.015
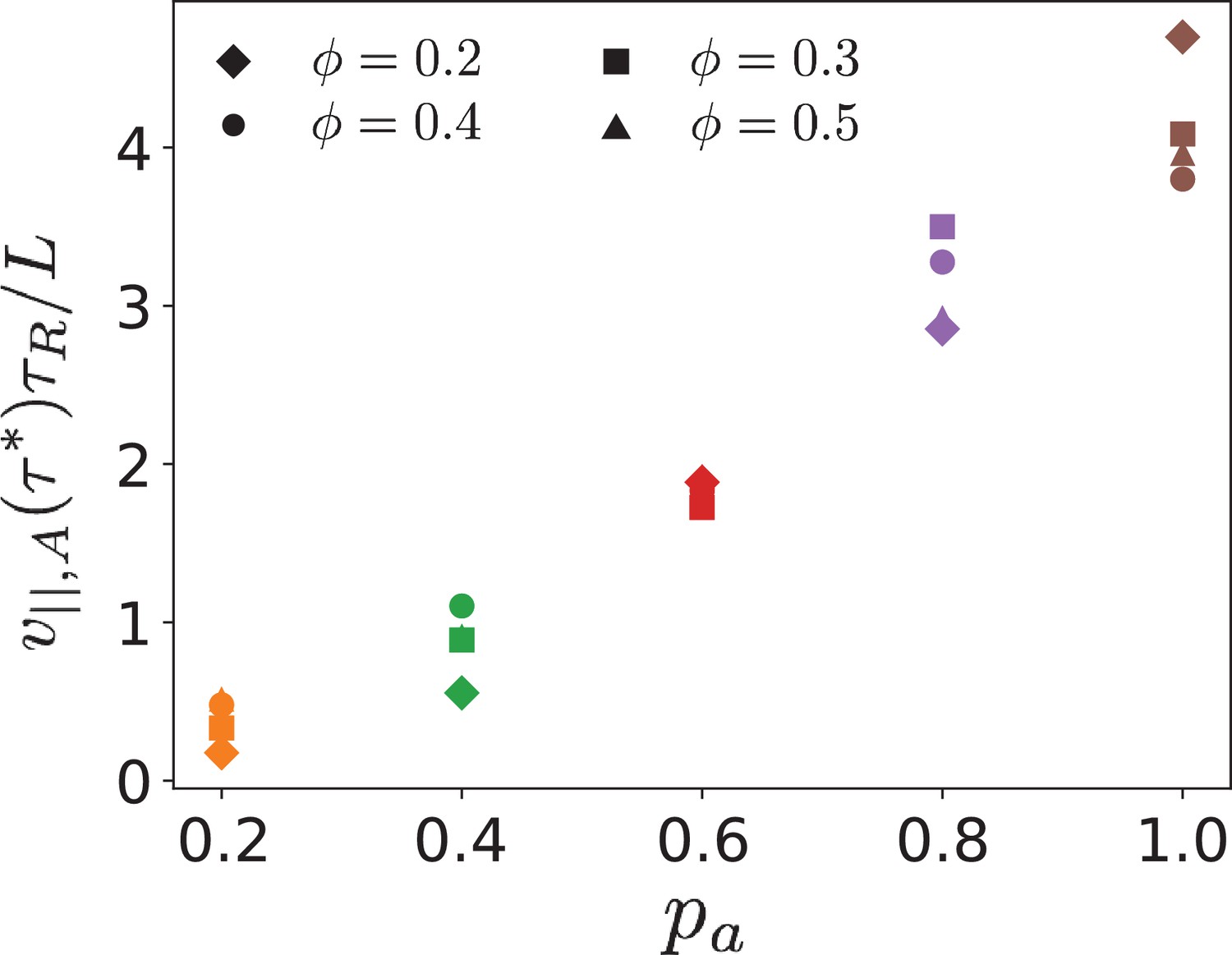
Figure 3—figure supplement 1
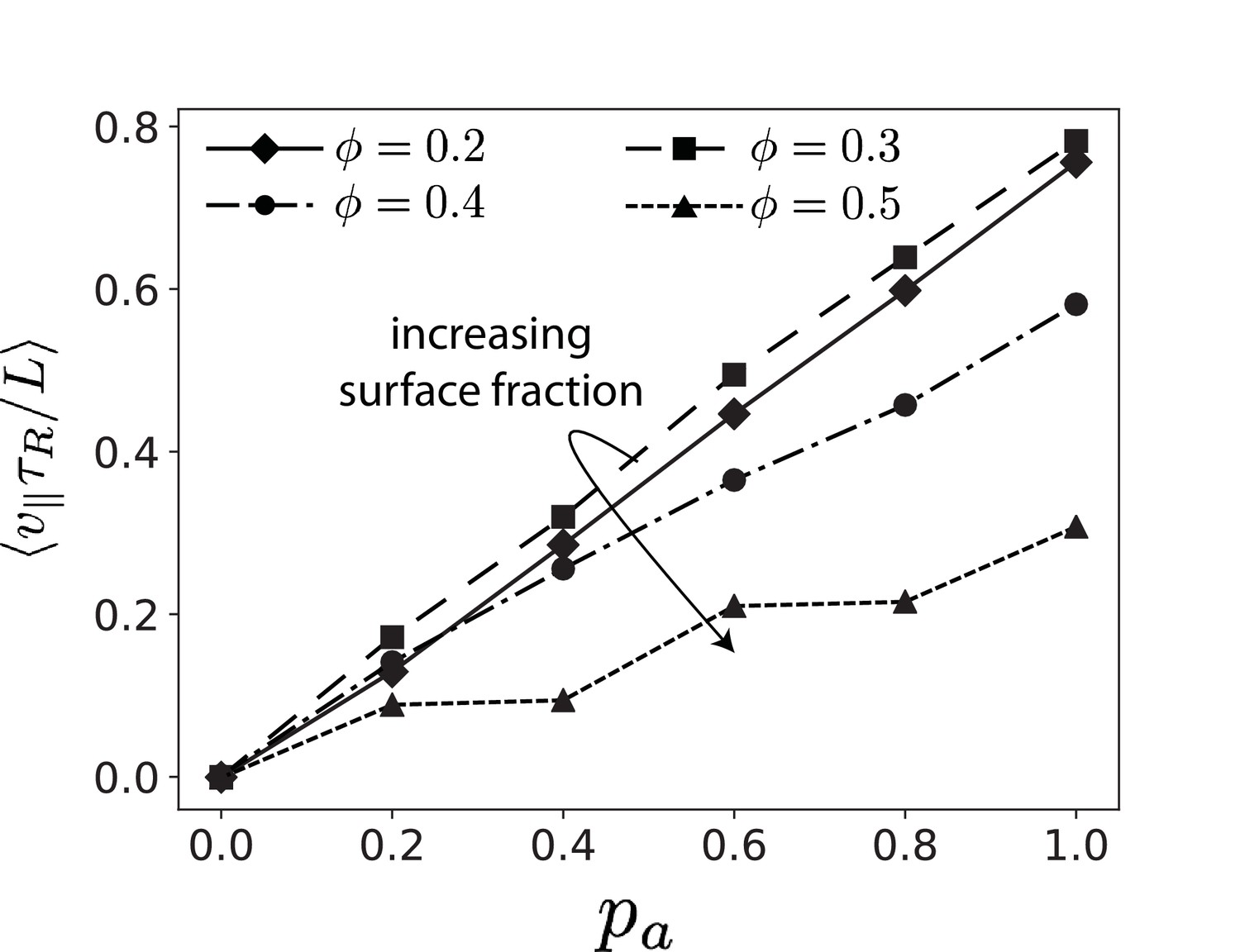
Parallel velocity , extrapolated to as function of the antialigned motor probability for various MT surface fractions .
https://doi.org/10.7554/eLife.39694.005
Figure 3—figure supplement 2
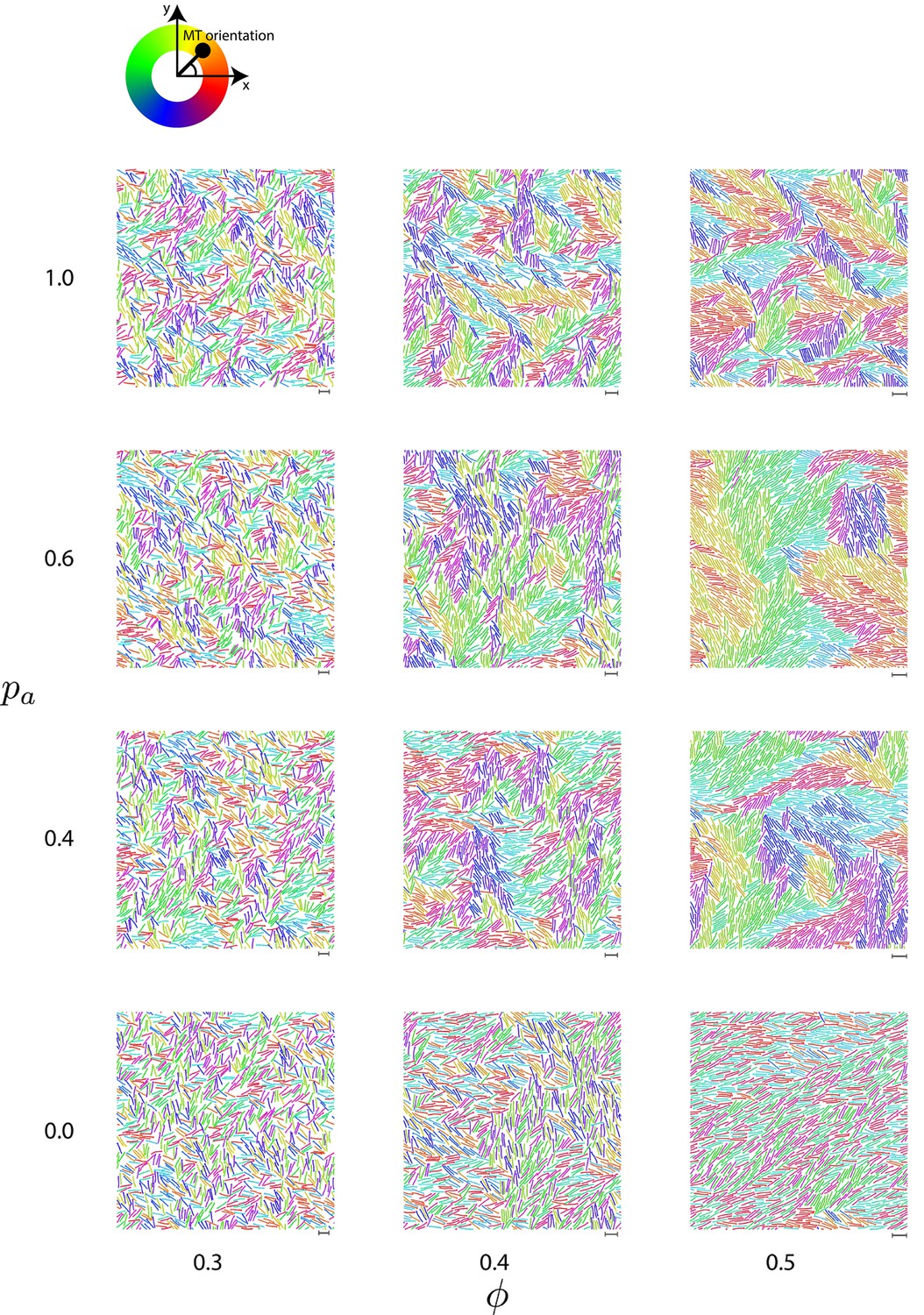
Simulation snapshots at steady state for various antialigned motor probabilities and MT surface fractions .
Data for and .
The surface fractions of MTs are varied by changing the size of the periodic box, while keeping the number of MTs constant. The scale bars correspond to the length of a single MT. The colours represent the orientation of the polar MTs with respect to the system reference frame according to the colour wheel above.
Figure 3—figure supplement 3
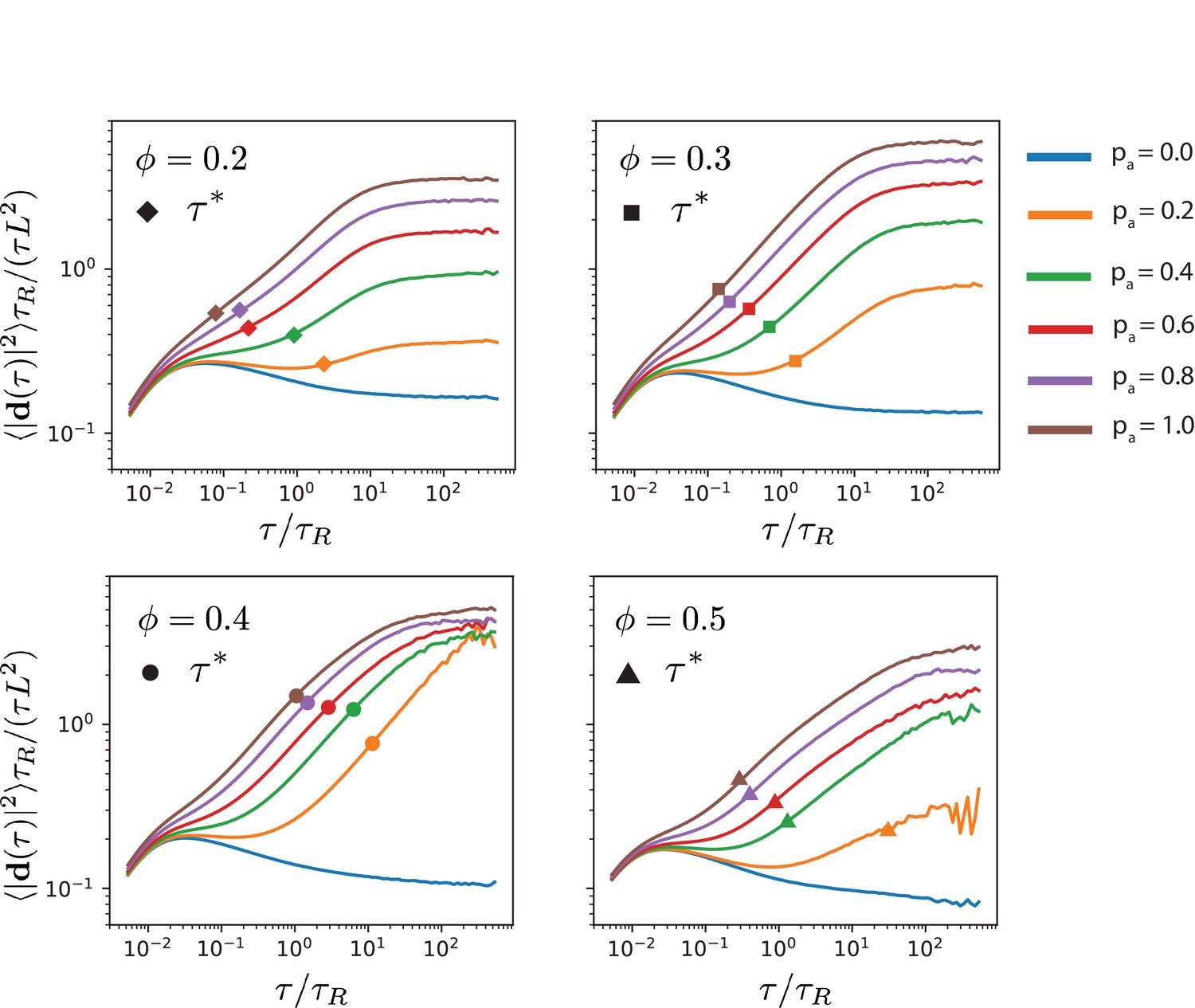
Translational MT mean squared displacements for various antialigned motor probilities and MT surface fractions .
The symbols on the plots indicate the time scale at which the parallel velocity is maximally skewed due to active forces.
Figure 3—figure supplement 4
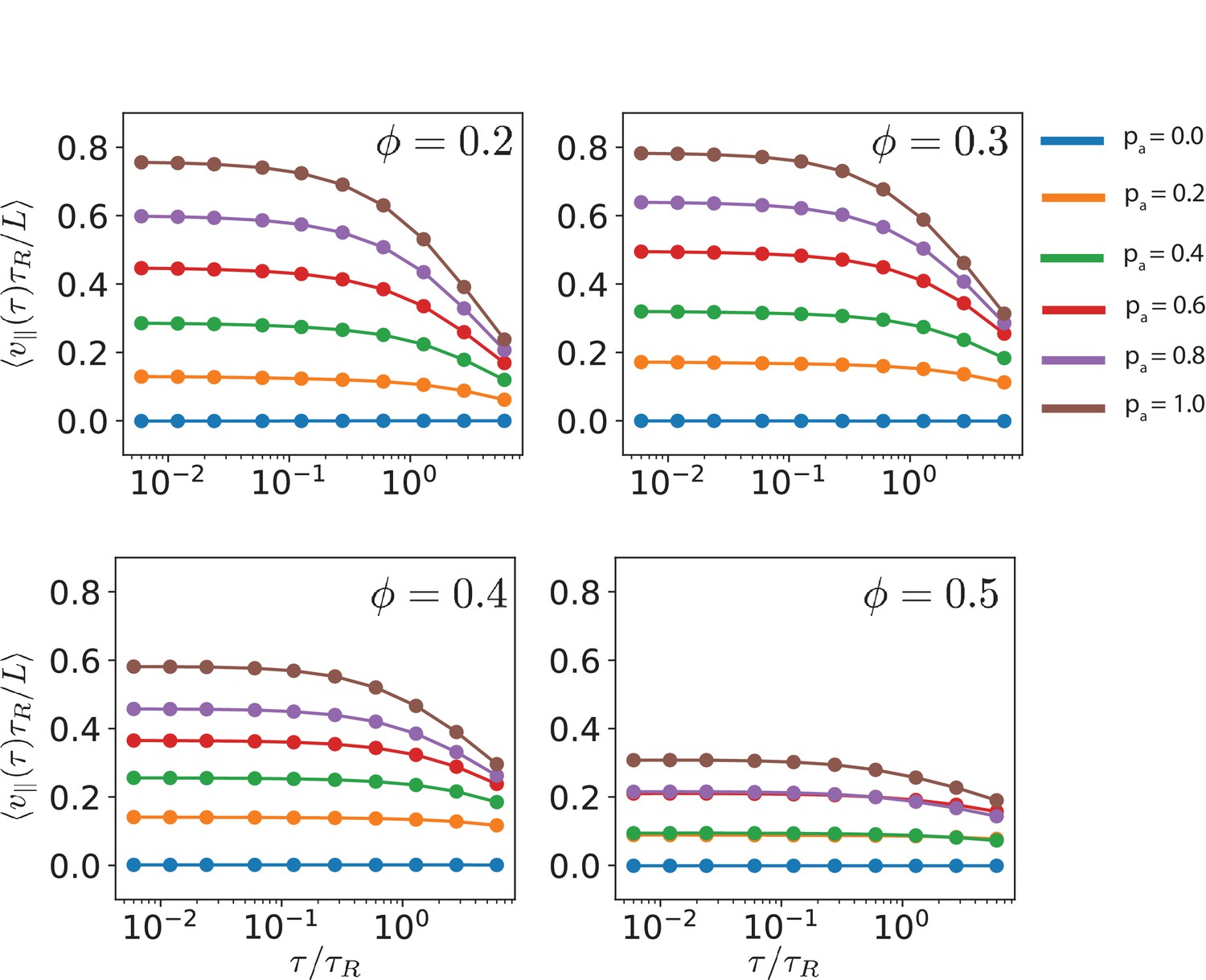
Parallel velocity as a function of the time window for various antialigned motor probabilities and MT surface fractions .
https://doi.org/10.7554/eLife.39694.008
Figure 3—figure supplement 5
Maximum parallel MT velocities as function of the antialigned motor probability for various MT surface fractions .
https://doi.org/10.7554/eLife.39694.009
Figure 3—figure supplement 6
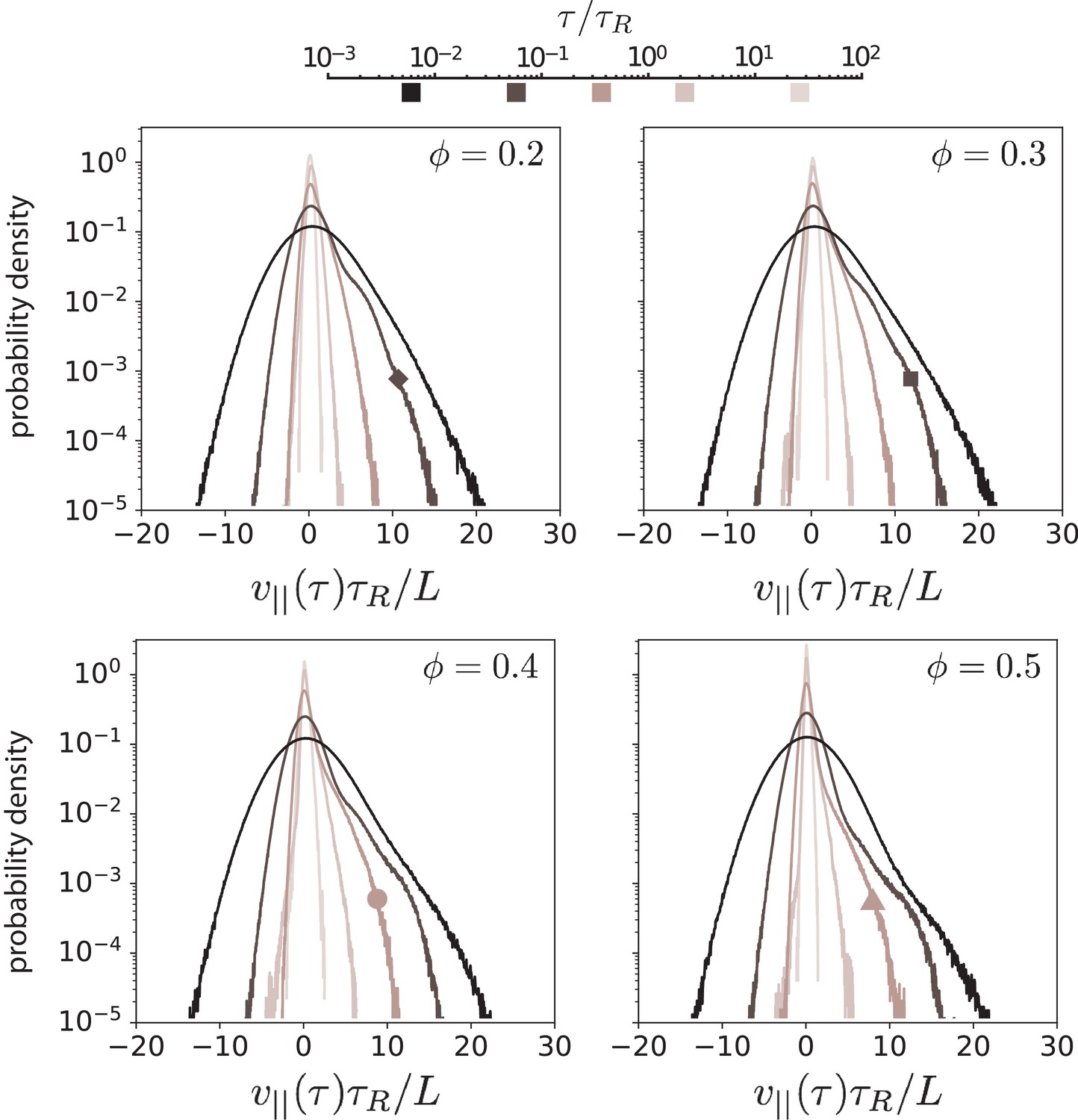
Histogram of for various MT surface fractions and five time windows .
The darkness of the curve represents the time window used to measure the parallel velocity. The darkest-coloured curve represents the parallel velocity obtained for the shortest time window, and the lightest-coloured curve is obtained from the longest time window. The box symbols mark the displacement distributions that are closest to the distribution which is most skewed.
Figure 3—figure supplement 7
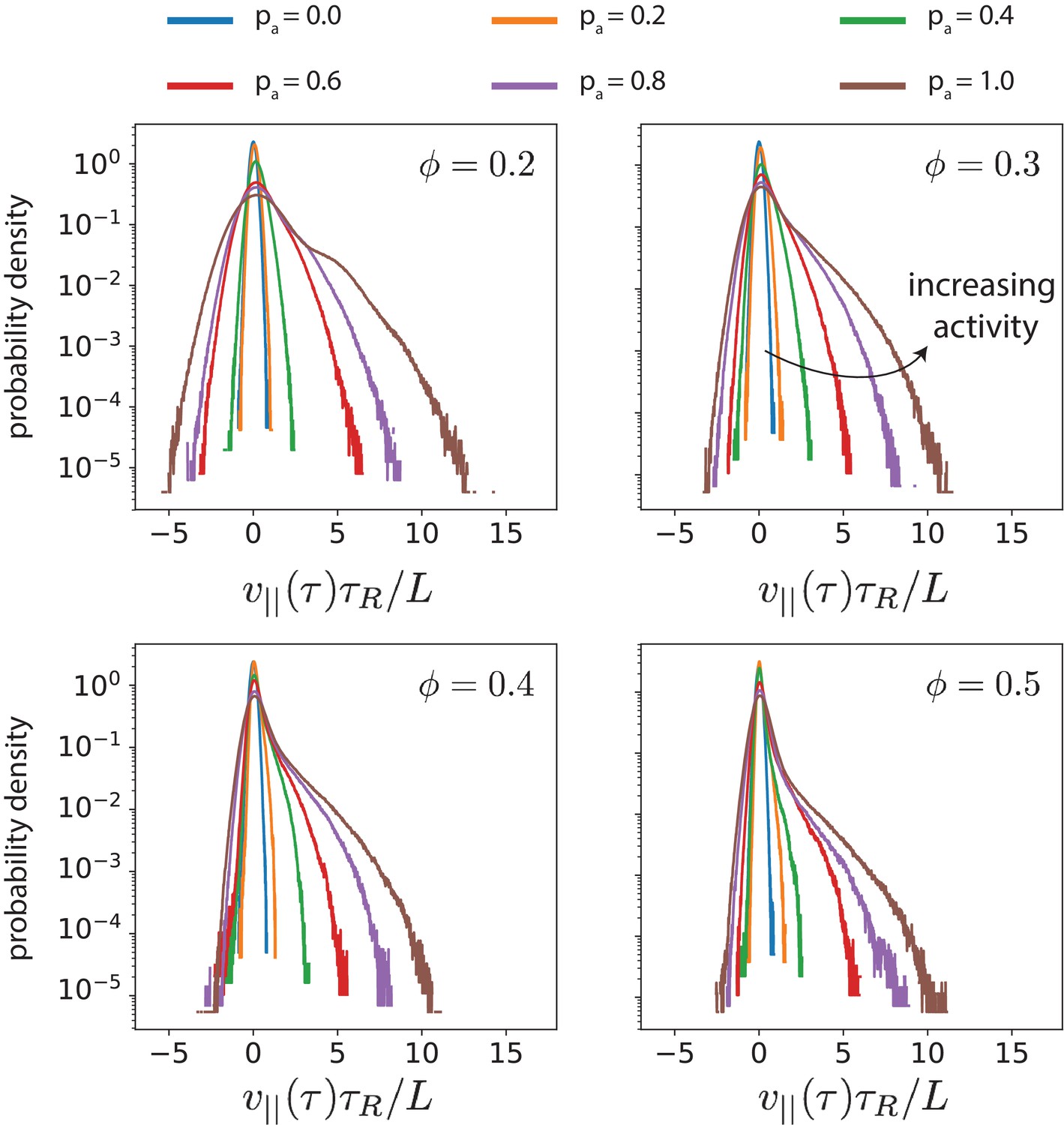
Histogram of for various and .
The duration of the time window corresponds to the maximal skew, see Figure 6. This indicates the structure of the velocity distribution when the skew is maximal. The ordinate axis is log scaled to show the deviation of the distribution from a Gaussian, which would appear as a symmetric inverted parabola.
Figure 3—figure supplement 8
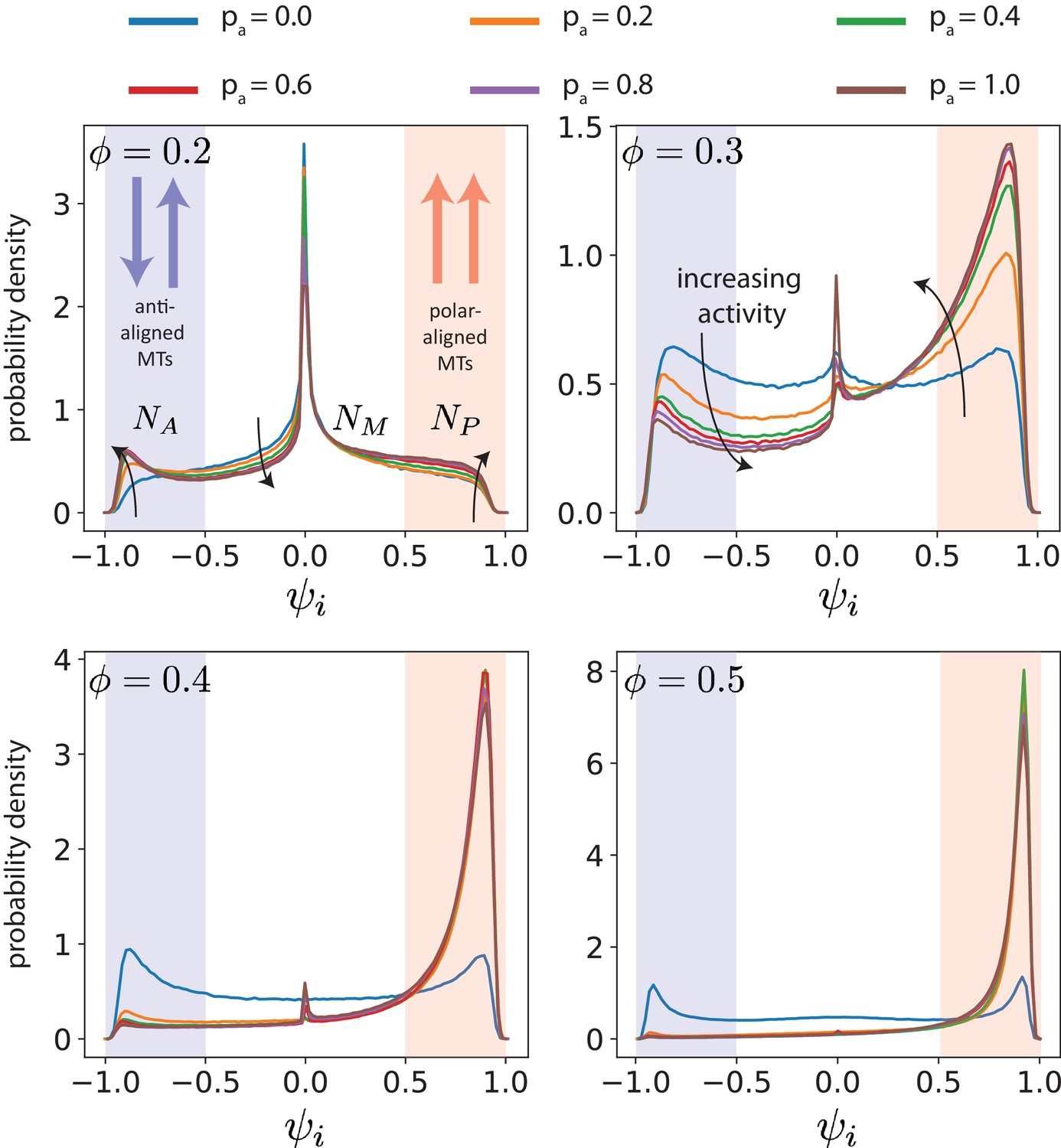
Probability densities of the MT local polar order parameter .
Data for various antialigned motor probabilities and MT surface fractions . The arrows indicate the changes of the probability densities for increasing activity. A, M and P indicate (green), (white), (blue), respectively. , and are the number of MTs in antialigned, perpendicular and polar-aligned environments respectively. Note that the scale of the ordinate is different for each MT surface fraction.
Figure 3—figure supplement 9
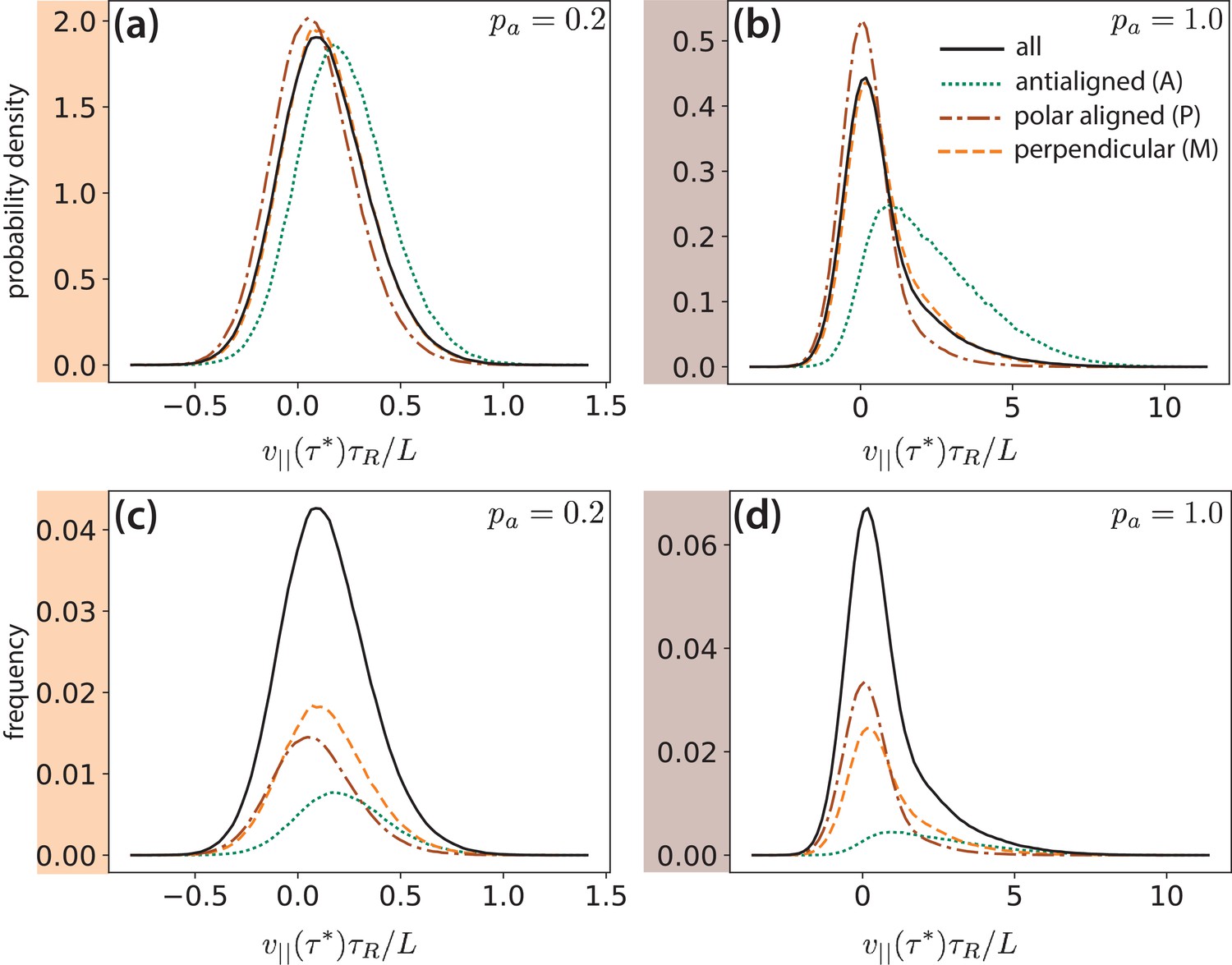
MT parallel velocity distributions.
Data for for a time window of duration and , decomposed based on MT environments (A, M, P) determined by their local polar order parameter, , see Figure 8. (a) and (b) show probability density histograms of for and , respectively. (c) and (d) show frequencies of occurrence of for and , respectively. The sum of the decomposed curves in (c) and (d) gives the solid curves.
Figure 3—figure supplement 10
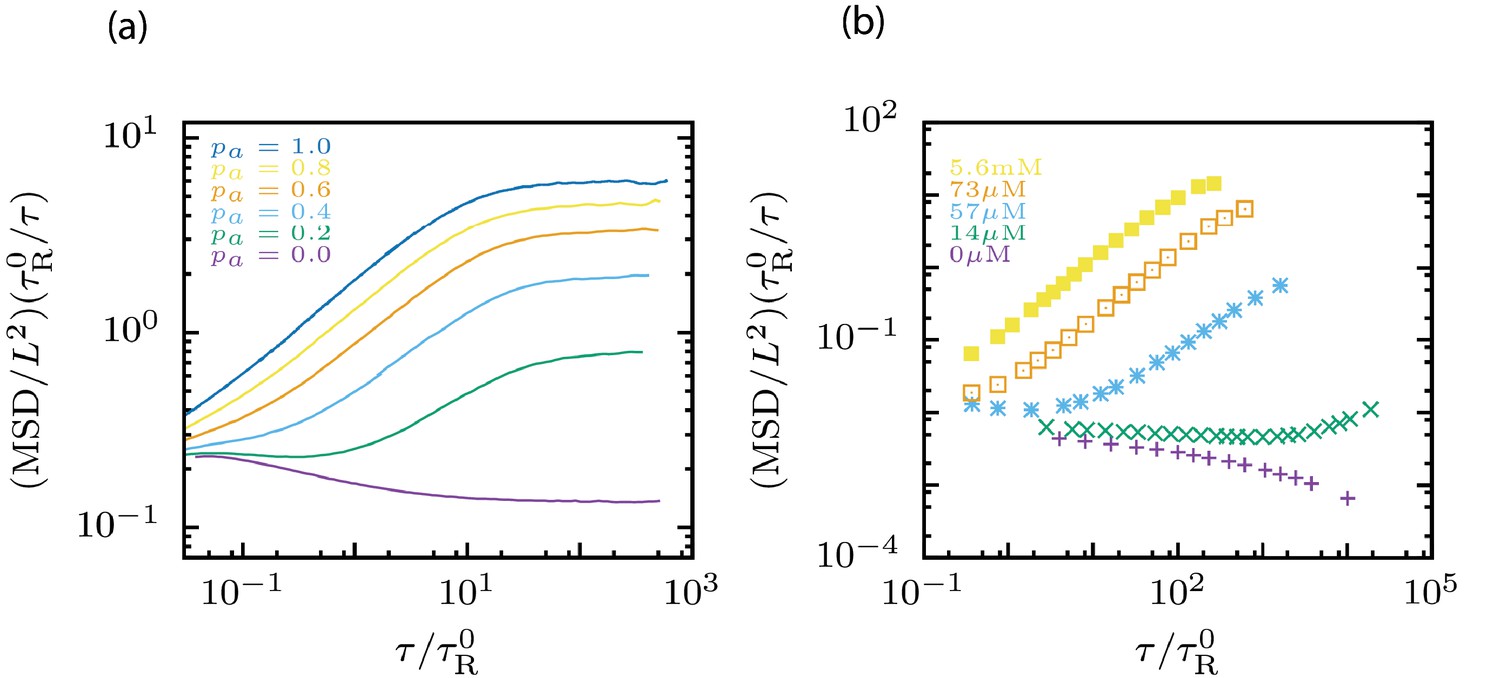
MT mean squared displacements: computer simulation and experimental data.
(a) Normalized MSD curves from our simulations for several motor probabilities . (b) Normalized MSD curves as a function of lag time for experiments eLifeMediumGrey (Sanchez et al., 2012) for selected ATP concentrations. Here is the filament length, the single filament rotation time and the lag time.
Figure 4 with 1 supplement
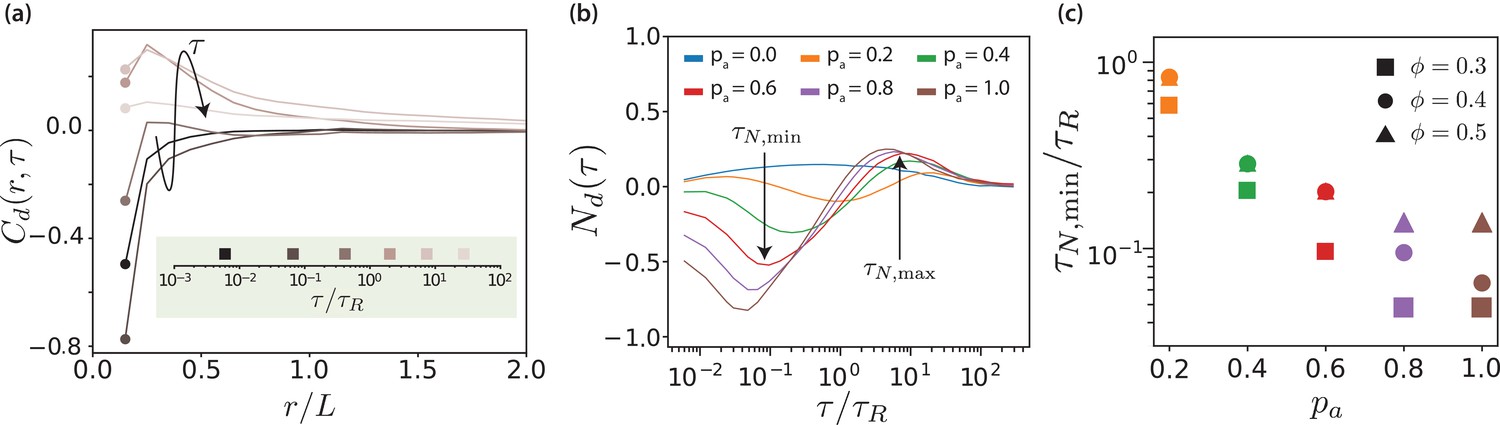
Displacement correlations of MTs.
(a) Spatio-temporal correlation function for and , for some selected lag times. The arrow and the colours of the curves indicate increasing lag time. The lag times are picked from a logarithmic scale. (b) Neighbour correlation function for and various values. (c) The sliding time scale indicated by is shown for various MT surface fractions and values.
-
Figure 4—source data 1
Source data for graphs shown in Figure 4 (a,b,c).
- https://doi.org/10.7554/eLife.39694.022
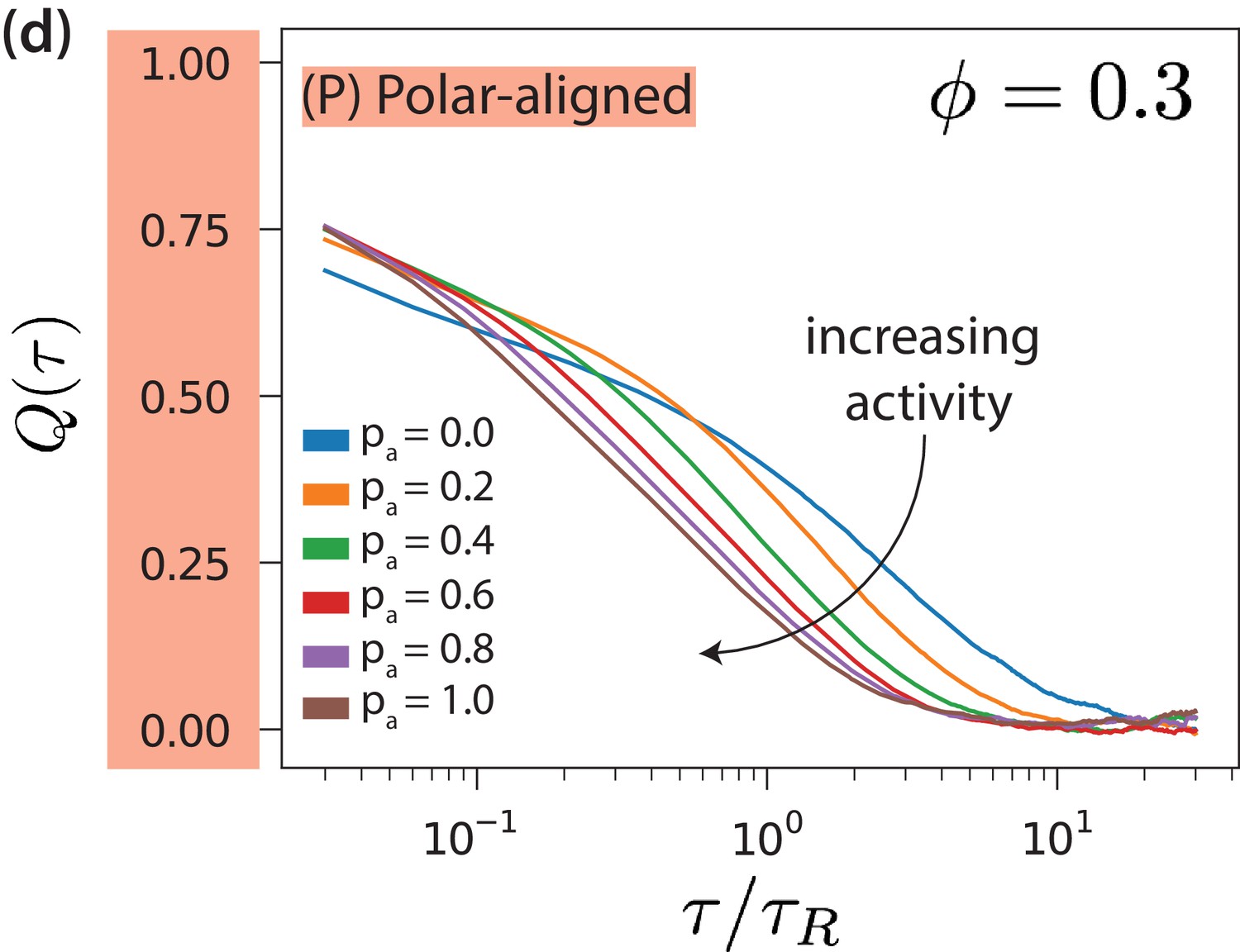
Figure 4—figure supplement 1
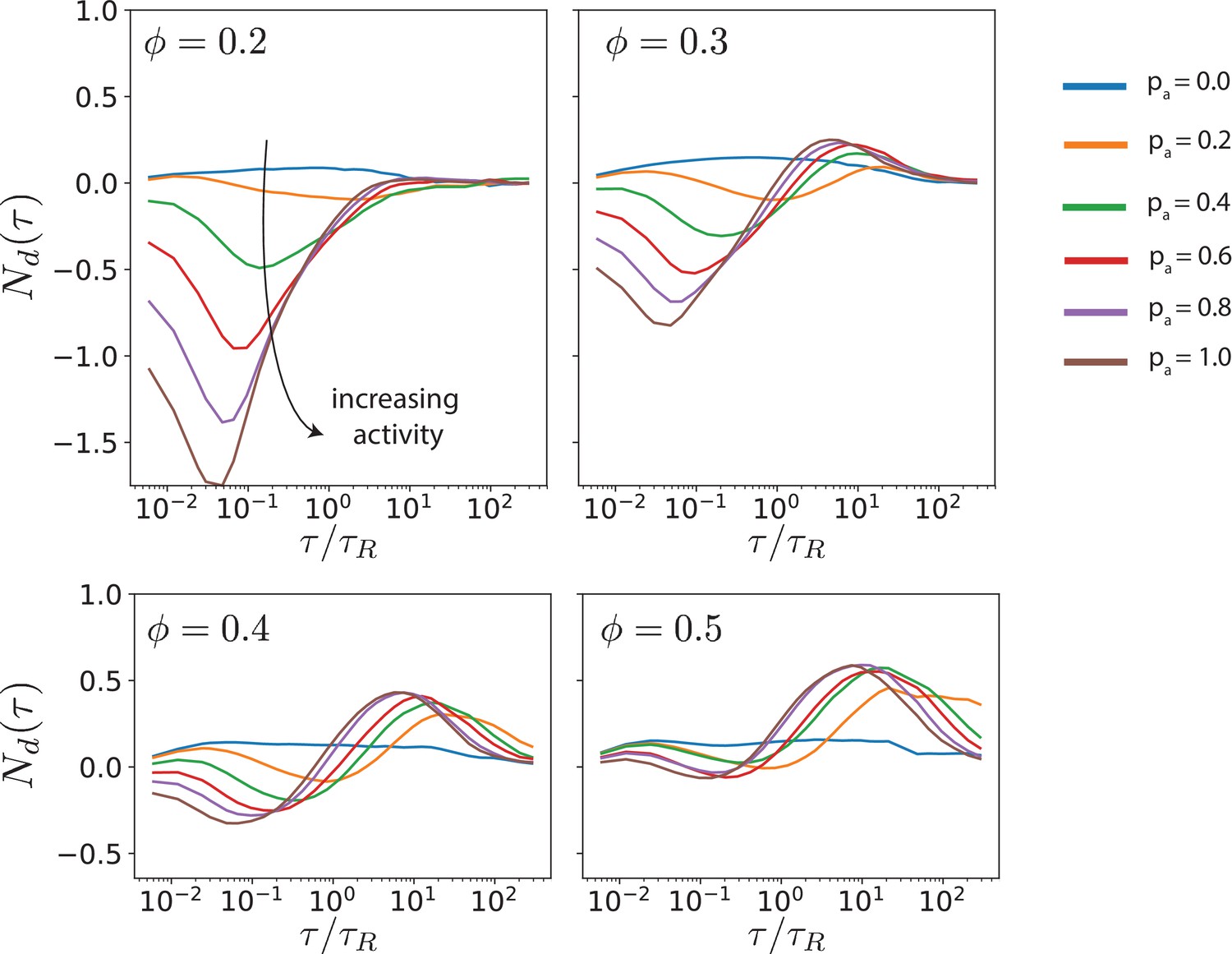
Neighbour displacement correlation function for various MT surface fractions and antialigned motor probabilities .
The lag times at which the minimum and maximum of occur are and , respectively.
Figure 5 with 3 supplements

Local polar order of MTs.
(a) Mean local polar order for and at , for MTs starting from antialigned (dotted line) and aligned (solid line) environments at . (b) Deviation of local polar order for for various for antialigned MTs. (c) Relaxation time for the polar order parameter, for various and , estimated by the time for to decrease to half its initial value.
-
Figure 5—source data 1
Source data for graphs shown in Figure 5 (a,b,c).
- https://doi.org/10.7554/eLife.39694.027
Figure 5—figure supplement 1
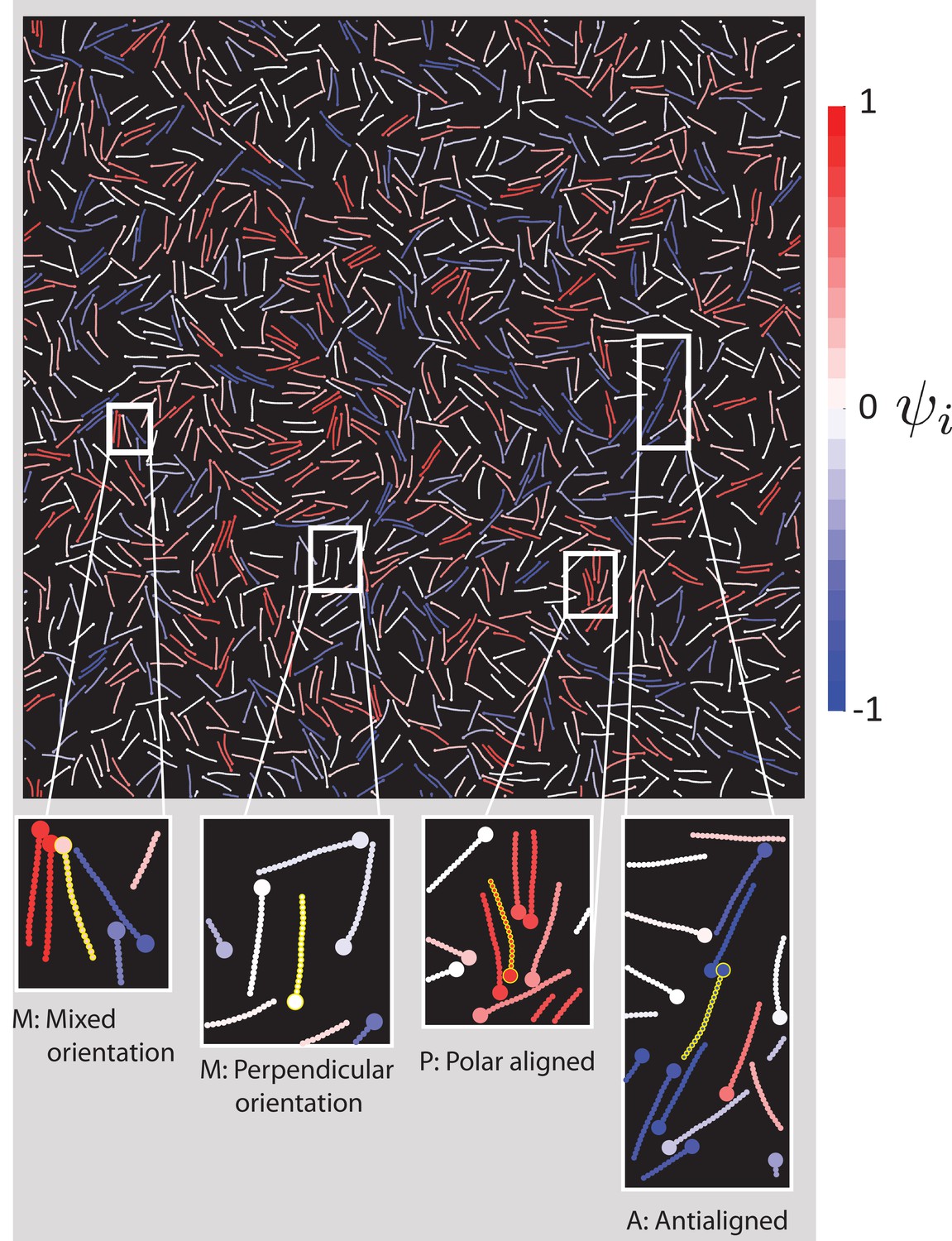
MTs coloured based on their local polar order parameter for , .
The colour corresponding to is given on the right. Zoomed in illustrations of MTs show examples of MTs in the three categories distinguished in Figure 8. The MT in question is highlighted in yellow in the zoomed in graphics. (M) values can occur either when MTs are perpendicularly oriented with respect to its surrounding or when MTs have neighbours which are both polar-aligned and antialigned. (P) occurs when MTs have neighbours which are mostly polar-aligned. (A) occurs when MTs have neighbours which are mostly antialigned.
Figure 5—figure supplement 2
Deviation from local polar order as function of the lag time for various antialigned motor probabilities for polar-aligned MTs.
https://doi.org/10.7554/eLife.39694.025
Figure 5—figure supplement 3
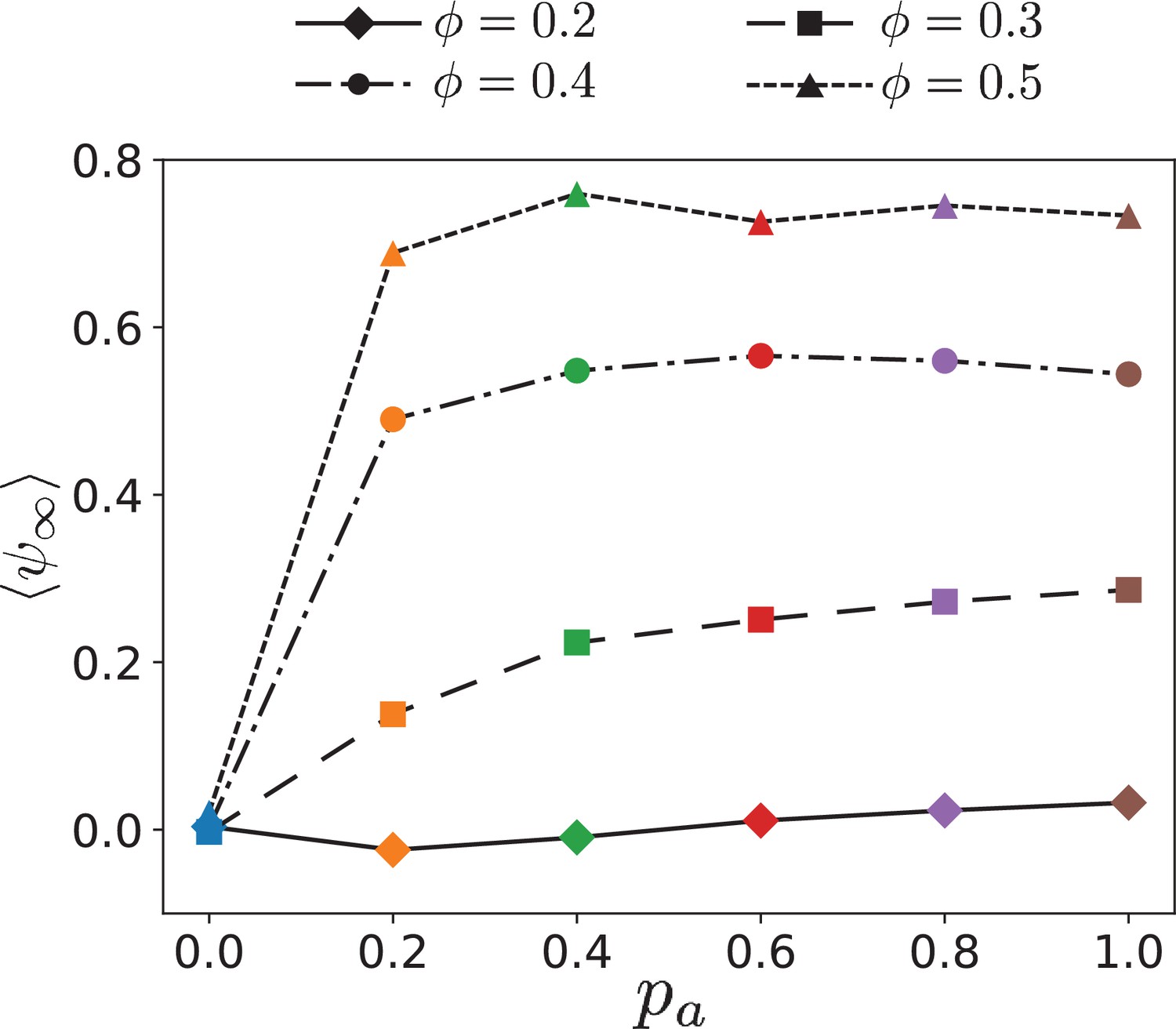
Mean local polar order parameter of MTs at long times, , for various surface fractions and antialigned motor probabilities .
https://doi.org/10.7554/eLife.39694.026
Figure 6 with 3 supplements
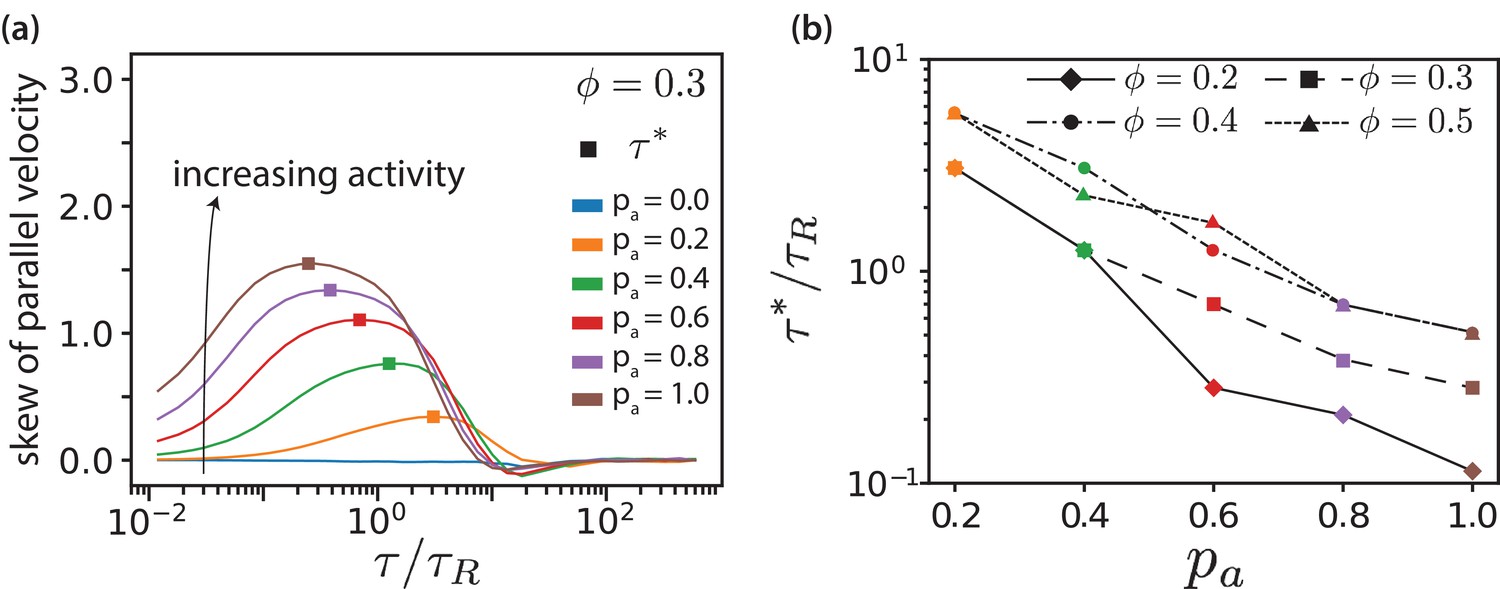
MT parallel velocity distributions.
(a) Skew of parallel velocity () distribution computed as function of lag times for different for . The probability distributions that correspond to the maximal skew are shown in Figure 3—figure supplement 6 together with distributions for few other lag times. (b) Lag time at which maximal skew is observed in the distribution (compare Figure 1). The ordinate is log-scaled to show that is exponentially decreasing with .
-
Figure 6—source data 1
Source data for graphs shown in Figure 6 (a,b).
- https://doi.org/10.7554/eLife.39694.032
Figure 6—figure supplement 1
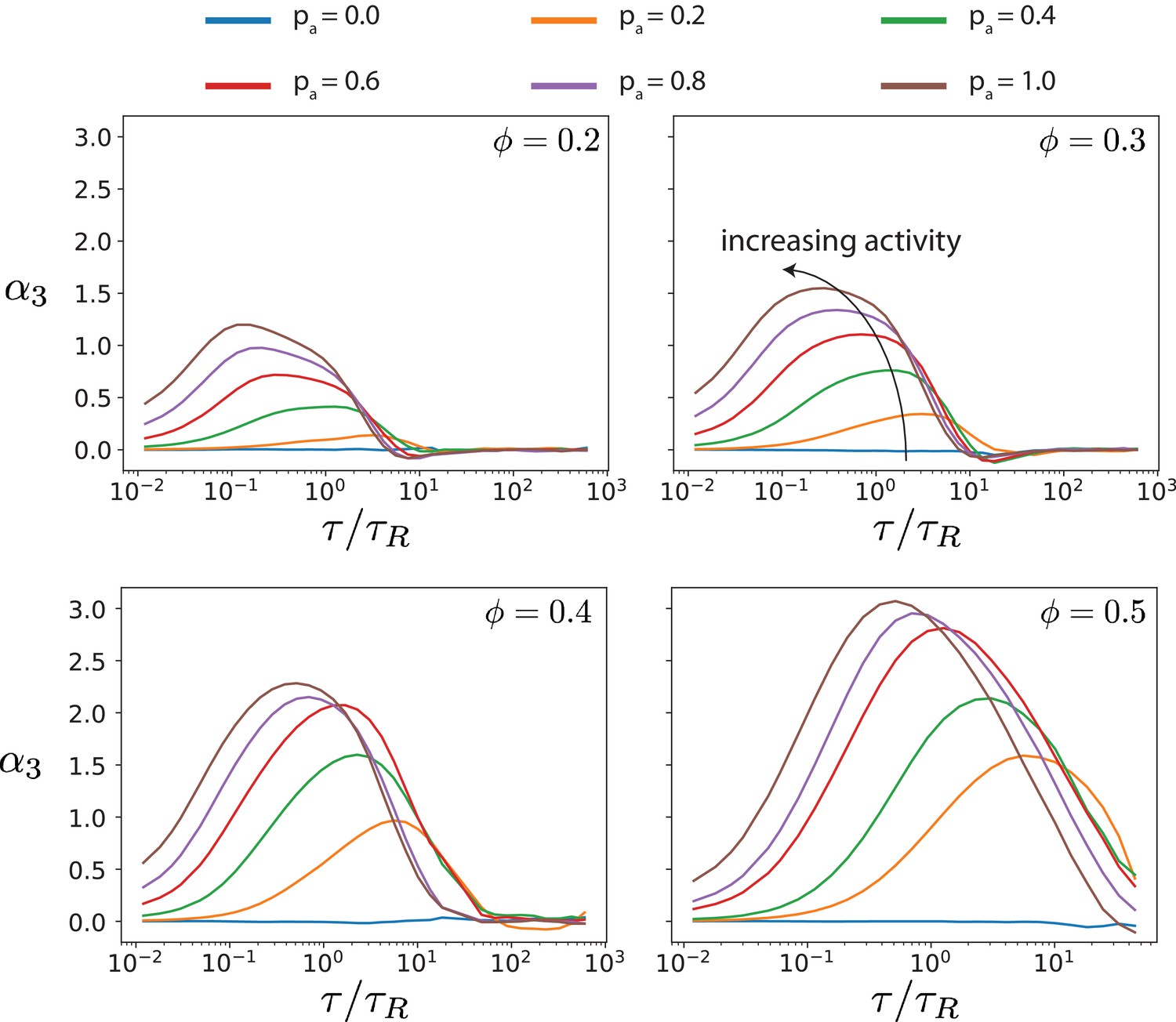
Skews of parallel velocity distributions () (Fig.
Figure 6) computed as a function of lag times for various antialigned motor probabilities and surface fractions . The probability distributions that correspond to the maximal skew are shown in Figure 6 together with distributions for few other lag times. The ordinate scale is the same for comparison of the skews for different MT surface fractions.
Figure 6—figure supplement 2
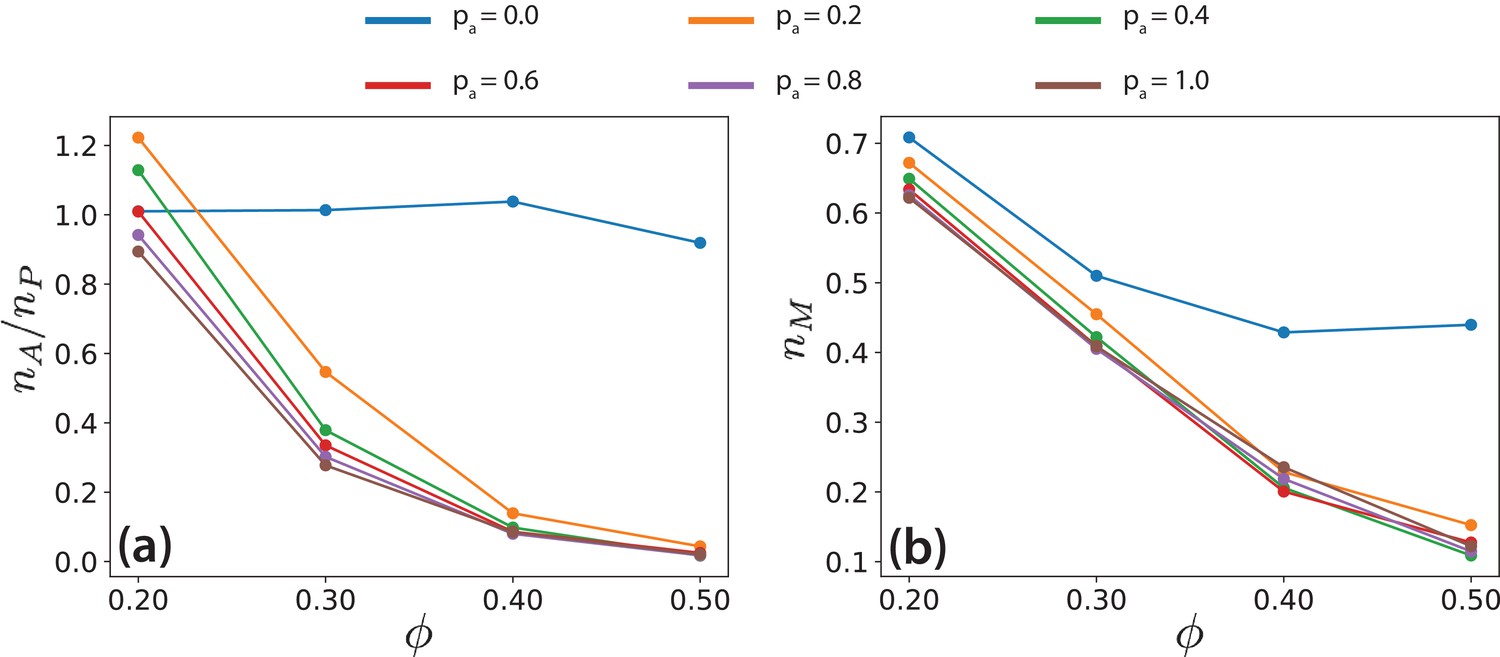
Ratios of MT populations in environments with different local polar order.
Ratios of MT populations in (a) antialigned to polar-aligned environments, and (b) perpendicular environments to total number of MTs, for various MT surface fractions and antialigned motor probabilities .
Figure 6—figure supplement 3
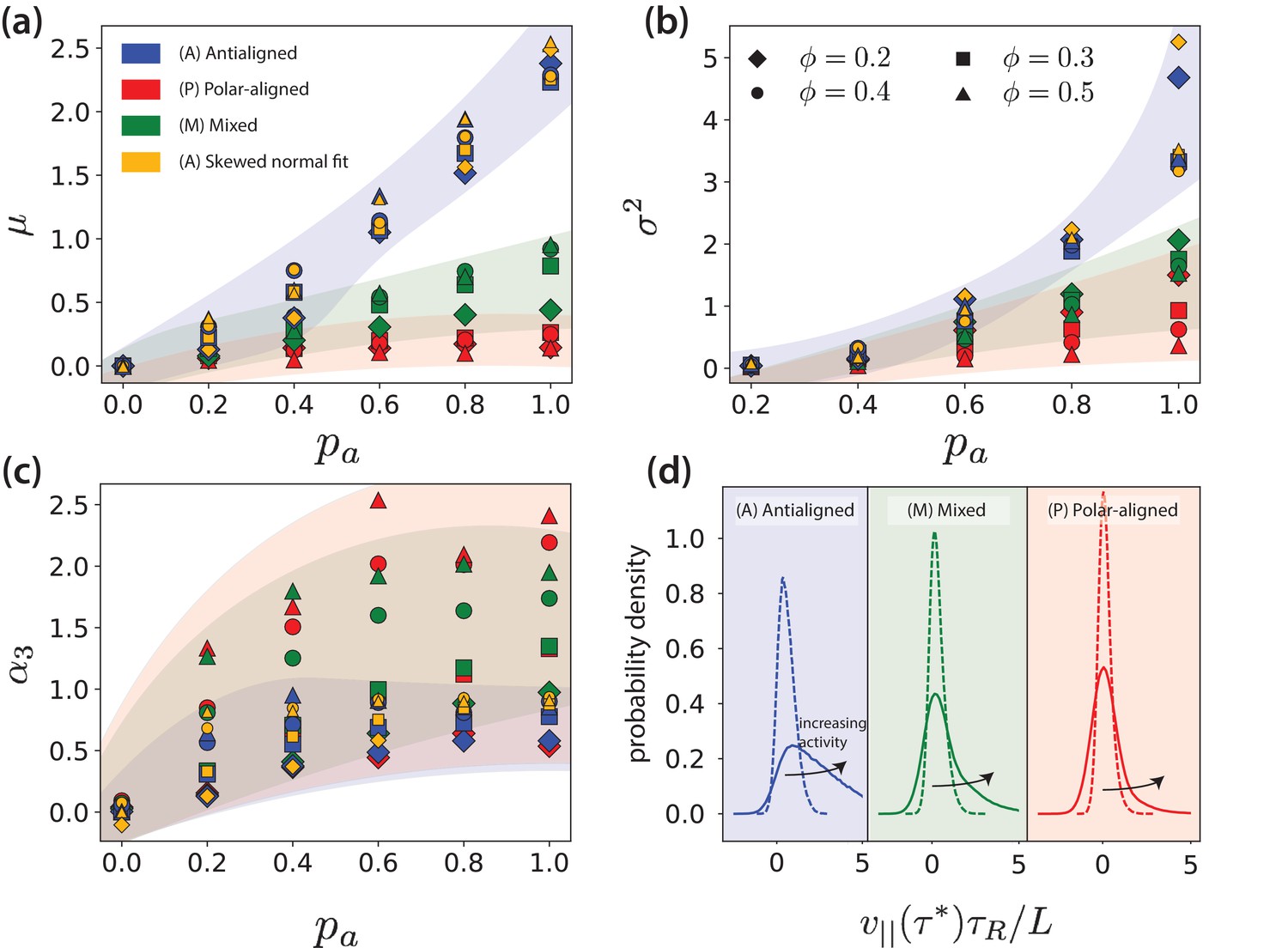
First three moments of the parallel velocity () distribution.
First three moments, (a) mean, (b) variance, (c) skew of the distribution for a time window of duration for MTs in (A) antialigned, (, blue), (P) polar-aligned (, red), and (M) mixed (, green) environments, for different and . The blue, red and green markers indicate moment calculated from raw data. The yellow markers are obtained from calculating moments from fits to the antialigned parallel MT velocity distribution . (d) Example of differences in structures of distributions due to increasing activity from (dotted line) to (solid line) for , for A, P and M categories of MT environment.
Figure 7 with 1 supplement
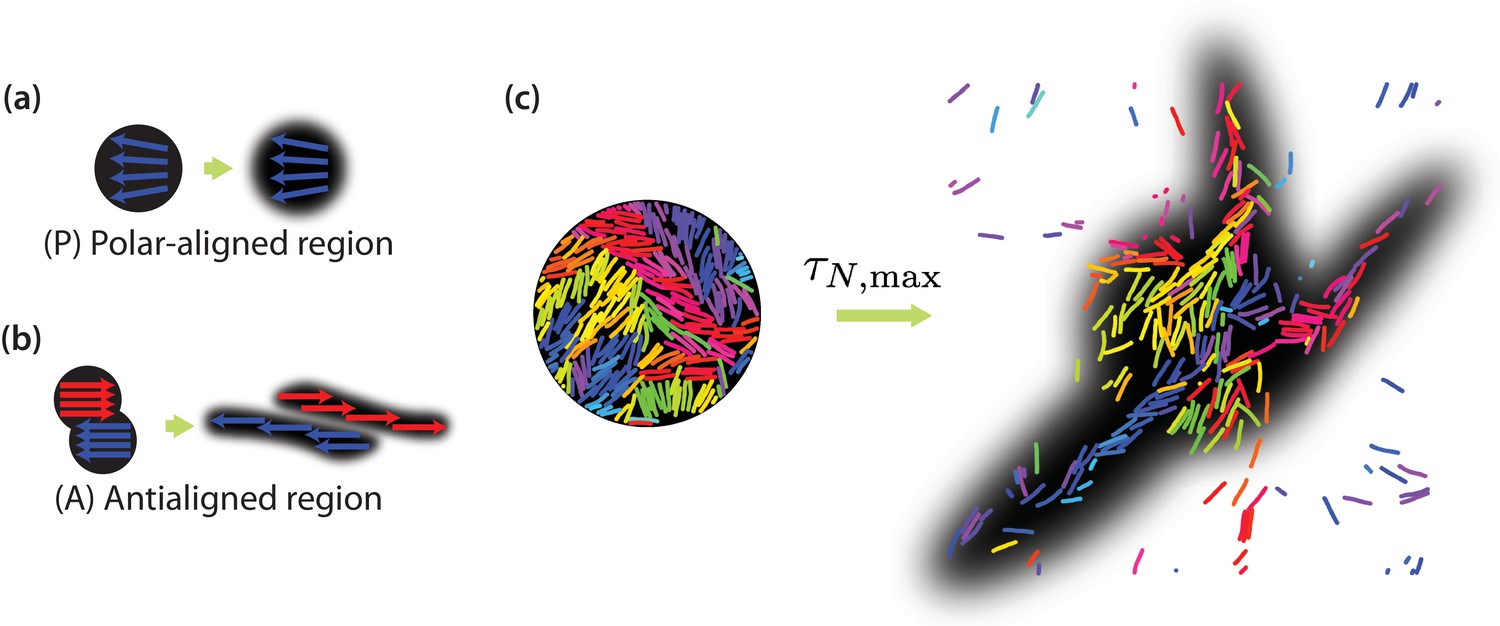
Collective motion of MTs.
Schematic of expected evolution of photobleached regions in (a) polar-aligned and (b) antialigned regions. (c) Selectively visualised MTs in a circular region within the simulation box, and their evolution after a time of , for and . The black backgrounds are predictions of FRAP results.
Figure 7—figure supplement 1
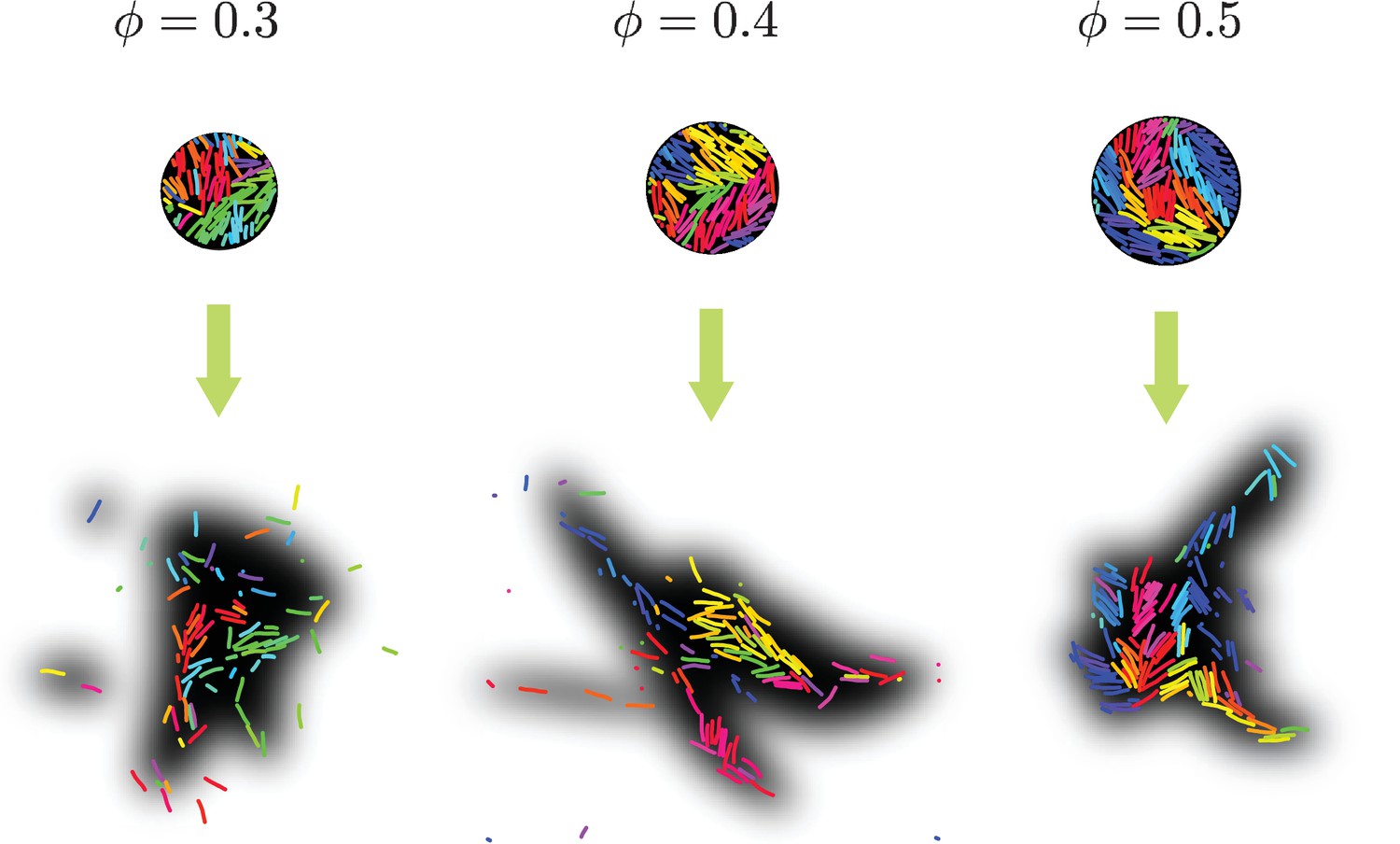
FRAP-like predictions for various MT surface fractions .
Predictions for photobleaching experiments with , , and . MTs retain the orientation colour from when they were tagged at . The black shadow shows our predictions for photobleaching experiments at time after bleaching a circular patch.
Figure 8
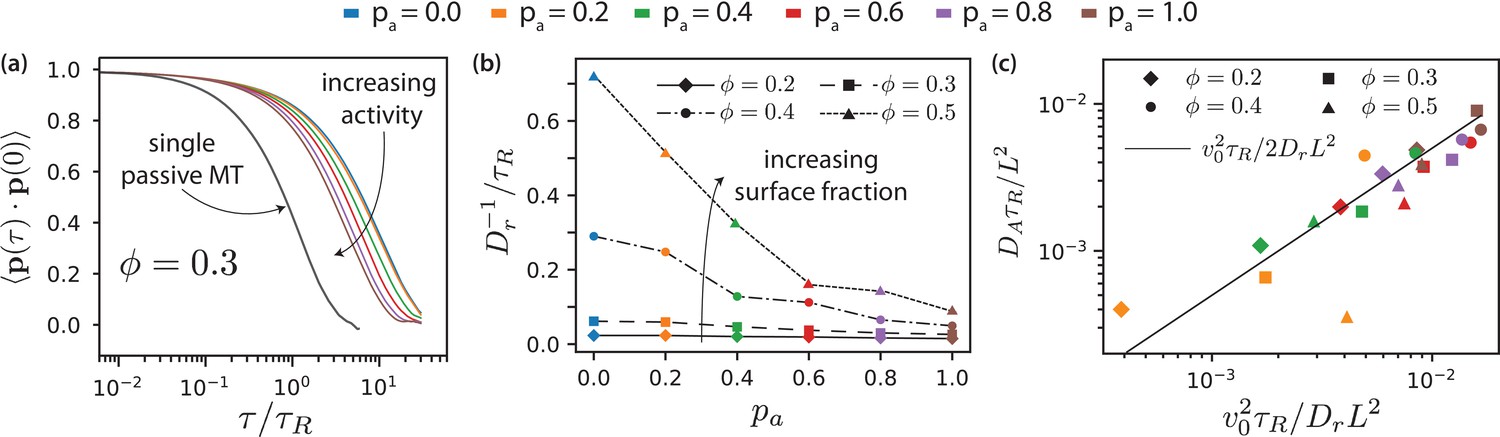
MT orientational correlation and active diffusion.
(a) Orientational correlation function for for various antialigned motor probabilities . (b) Inverse of rotational diffusion, for various antialigned motor probabilities and surface fractions (c) Active diffusion coefficient for .
-
Figure 8—source data 1
Source data for graphs shown in Figure 8 (a,a-one filament,b,c).
- https://doi.org/10.7554/eLife.39694.036
Figure 9
Chronology of MT streaming. Events from antialigned MT propulsion to MT rotation (left to right) which make up the streaming process, for various antialigned motor probabilities and surface fractions , , and (c) as indicated.
https://doi.org/10.7554/eLife.39694.037-
Figure 9—source data 1
Source data for graphs shown in Figure 9 (a,b,c).
- https://doi.org/10.7554/eLife.39694.038
Author response image 1
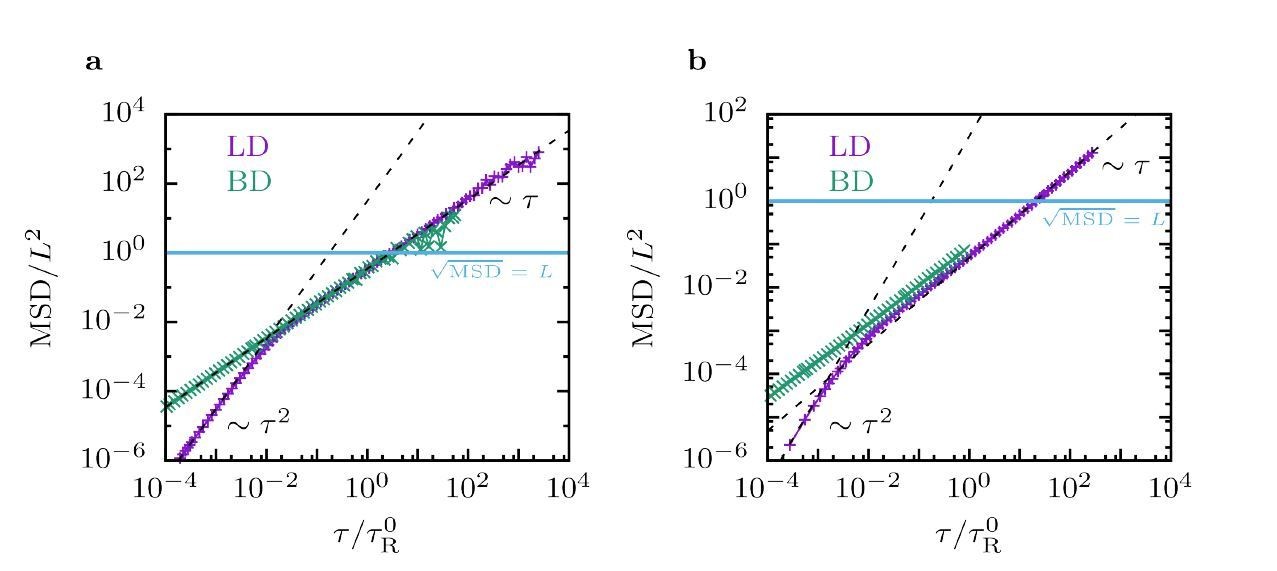
Mean squared displacements of filaments obtained from Langevin Dynamics (LD) and Brownian Dynamics (BD), for single filaments (left) and filaments in suspensions with packing fraction 𝜙 = 0.3 (right).
The simulation parameters are the same as in the manuscript.
Videos
Video 1
Steady-state dynamics of the MT-effective motor system shown in Figure 3(a) for 100 .
MTs are coloured based on their orientation.
Video 2
Streaming motion of antialigned and diffusive motion of polar-aligned MTs for 100 , corresponding to Figure 3(b). The scale bar corresponds to the length of 10 MTs.
Trajectories of MTs are shown within time windows of .
Video 3
Center-of-mass trajectories for selected MTs for , corresponding to Figure 3(c).
Fast streaming and slow diffusion is indicated by yellow and red, respectively. The scale bar corresponds to the length of five MTs.
Video 4
Inhomogeneous dynamics over a period of 100 .
Fast MTs are coloured yellow, and slow MTs are coloured blue.
Tables
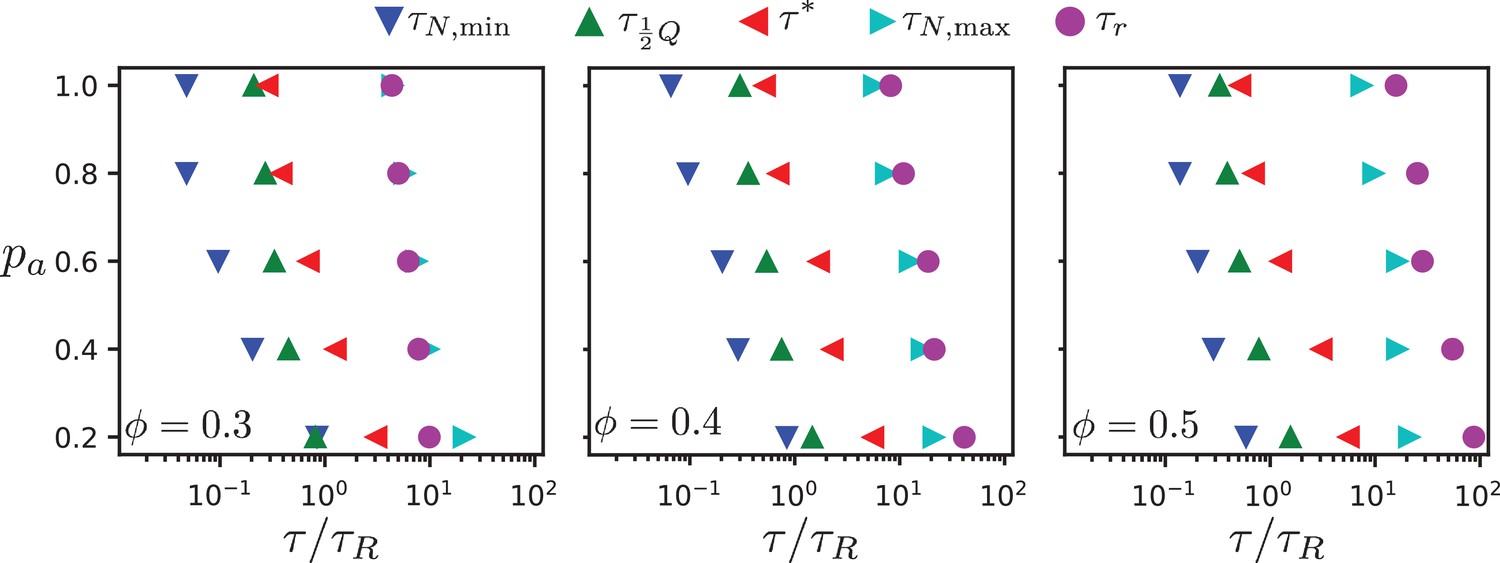
Table 1
Table of time scales involved in MT dynamics.
The time scales reported are approximate values for various antialigned motor probabilities and surface fractions .
| Symbols | Time scale () | Derivation | |
|---|---|---|---|
| Passive diffusion | Slope of MSD | ||
| Antialigned propulsion | Minimum of | ||
| Streaming | decay time | ||
| Maximal skew | Maximum skew of | ||
| Collective migration | Maximum of | ||
| Active rotation | Orientational correlation time |
Table 2
Parameter values used in the simulations.
https://doi.org/10.7554/eLife.39694.040| Parameter | Symbol | Value | Notes/Biological Values |
|---|---|---|---|
| Thermal energy | room temperature | ||
| MT length | m | m (Howard et al., 1989) | |
| MT diameter | nm | (Chrétien and Wade, 1991) | |
| MT bond angle constant | rigid MTs | ||
| MT bond spring constant | preserves MT length (Isele-Holder et al., 2015) | ||
| Dynamic viscosity | Pa s | viscosity of cytoplasm (Wirtz, 2009) | |
| Characteristic energyof WCA potential | pN nm | (Bates and Frenkel, 2000; Bolhuis and Frenkel, 1997; McGrother et al., 1996) | |
| Motor spring constant | pN/nm | per kinesin (Coppin et al., 1995), high number of effective motors | |
| Equilibrium motor length | nm | MT-MT distance at contact | |
| Motor dwell time | s |
Table 3
Dimensionless parameters and ranges of the values used in the simulations.
https://doi.org/10.7554/eLife.39694.041| Parameter | Symbol | Value |
|---|---|---|
| MT surface fraction | ||
| MT aspect ratio | ||
| Reduced MT bond angle stiffness | ||
| Reduced MT persistence length | ||
| MT bond spring constant | ||
| Reduced motor spring constant | ||
| Reduced motor equilibrium length | ||
| Antialigned motor probability | ||
| Reduced single-bead friction | ||
| Reduced system size |
Additional files
-
Source code file 1
Source code that adds effective motors to simulations of semiflexible filaments using the open-source Large-scale Atomic/Molecular Massively Parallel Simulator (LAMMPS).
- https://doi.org/10.7554/eLife.39694.042
-
Transparent reporting form
- https://doi.org/10.7554/eLife.39694.043
Download links
A two-part list of links to download the article, or parts of the article, in various formats.
Downloads (link to download the article as PDF)
Open citations (links to open the citations from this article in various online reference manager services)
Cite this article (links to download the citations from this article in formats compatible with various reference manager tools)
Chronology of motor-mediated microtubule streaming
eLife 8:e39694.
https://doi.org/10.7554/eLife.39694




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}